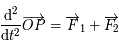
Sous forme vectorielle on a , soit : , où et .
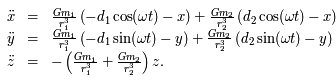
Sachant que les coordonnées de et dans le repère fixe sont et respectivement, on en déduit les équations du mouvement :
 , soit :
, soit : 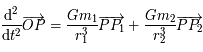 , où
, où  et
et  .
, soit : , où et .
.
, soit : , où et .
 et
et  dans le repère fixe sont
dans le repère fixe sont  et
et  respectivement, on en déduit les équations du mouvement :
respectivement, on en déduit les équations du mouvement :