On a :
,
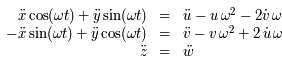
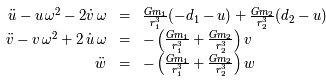
En multipliant la première par et la deuxième par et en ajoutant d'une part, et en multipliant la première par et la deuxième par et en retranchant d'autre part, on obtient le système suivant :
Ainsi :
 ,
,
 et la deuxième par
et la deuxième par  et en ajoutant d'une part, et en multipliant la première par
et en ajoutant d'une part, et en multipliant la première par
 et la deuxième par
et la deuxième par  et en retranchant d'autre part, on obtient le système suivant :
et en retranchant d'autre part, on obtient le système suivant :
 ,
,
 ,
,