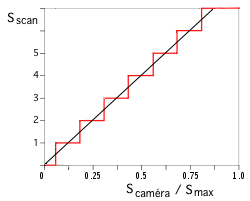
L'erreur est la différence entre le signal d'entrée et le signal de sortie, similaire à une erreur d'arrondi :
On commence par corriger de l'erreur systématique (biais, ou offset) en centrant la différence — ce biais est de 1/2 pas-codeur :