Vitesse relative, accélération absolue
Dans la mécanique newtonienne, la vitesse est relative – elle dépend du référentiel, – mais l’accélération (la variation de vitesse) est absolue. Ce concept est illustré par l'exemple d'un voyageur sur un train. Nous considérerons deux cas. Dans le premier, le train roule à une vitesse constante. Dans le deuxième, il accélère (ou décélère) brusquement.
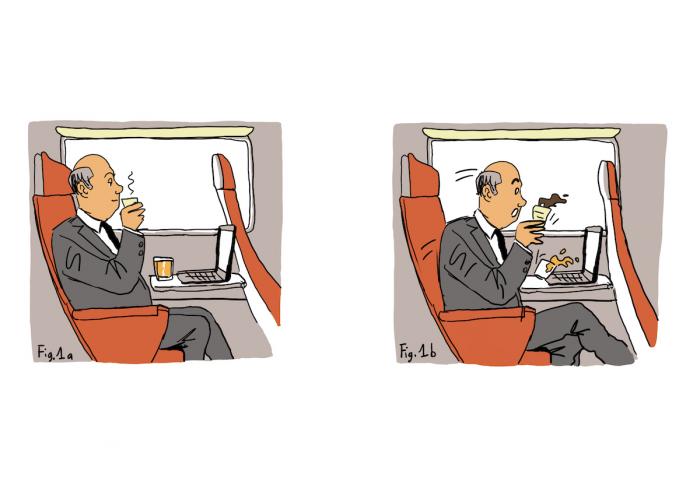
Quand le train voyage à une vitesse constante, s'il n'y a pas de roulis, le mouvement du train est imperceptible. Le passager prend son petit déjeuner confortablement assis dans son siège, comme s'il était chez lui (Fig. 1a). Seulement en voyant les arbres à côté du chemin de fer venir vers lui, le passager s'aperçoit que le train est mouvement. Dans un tunnel, avec tous les rideaux fermés, il pourrait bien se demander, à un certain moment, si le train roule ou s'il est à l'arrêt. Il est impossible pour le passager de déterminer la vitesse du train sans regarder hors des fenêtres. La vitesse du train n'est définie que par rapport à quelque chose d'externe au train.
En revanche, si le train ralentit brusquement (ce qui correspond à une accélération négative), le passager s'en aperçoit tout de suite, parce qu'il voit son café et son jus d'orange partir en avant (Fig. 1b). Les dégâts que le café et le jus d'orange produisent s'ils se renversent sur le costume ou l'ordinateur du passager constituent des faits objectifs. La décélération brutale du train est une réalité absolue. Elle ne dépend pas du référentiel utilisé pour décrire le mouvement.
L'inertie et les forces apparentes
La réalité indéniable que les verres avec le café et le jus d'orange se sont renversés n'explique pas quelle force a provoqué cet accident. Chercher cette force est, pourtant, inutile, parce qu'elle n'existe pas. Tout simplement, les verres voyageaient avec la même vitesse que le train. Quand le train a ralenti, ils ont continué à avancer à la même vitesse. Si un verre avance plus vite que la tablette sur laquelle il a été posé, c'est logique qu'il puisse se renverser. Ce qui pourrait paraître comme une force est donc la tendance du mouvement acquis à se conserver en l’absence de forces contraires. Cette tendance est dite inertie.
On peut, bien sûr, décrire les effets de l'inertie come les conséquences d'une force si, selon la logique des apparences, on cherche à décrire les phénomènes comme ils se présentent à la personne qui les observe (phenomena est le mot grec pour apparences). On dit, alors, que l'inertie se manifeste comme une force apparente dans le référentiel de l'observateur.
Derrière cette force apparente, il y a une force une force réelle : c'est la force de freinage, qui cause la décélération du train. L'observateur a l'impression qu'une force agit sur les verres, alors qu'en réalité la force agit sur lui et sur le wagon dans lequel il se trouve.
Le principe d'équivalence
L’accélération gravitationnelle présente une particularité. Le principe fondamental de la dynamique nous dit que l’action d’une force F sur un corps de masse m produit une accélération  . Dans le cas de l'électricité, la force F avec laquelle deux charges s'attirent ne dépend de leurs masses (les masses apparaissent nulle part dans la loi de Coulomb). Donc, l’accélération a sera plus grande pour un corps moins massif et plus petite pour un corps plus massif.
. Dans le cas de l'électricité, la force F avec laquelle deux charges s'attirent ne dépend de leurs masses (les masses apparaissent nulle part dans la loi de Coulomb). Donc, l’accélération a sera plus grande pour un corps moins massif et plus petite pour un corps plus massif.
Dans le cas de la gravitation, la force F avec laquelle deux masses M et m s'attirent est  , où r est la distance entre les deux masses et G est la constante de gravitation universelle. Donc, l'accélération de la masse m due à l'attraction gravitationnelle de la masse M,
, où r est la distance entre les deux masses et G est la constante de gravitation universelle. Donc, l'accélération de la masse m due à l'attraction gravitationnelle de la masse M,  , ne dépend pas de m. L'accélération gravitationnelle est la même pour un pomme de 200 g et une balle de canon de 5 kg. Si on laisse chuter un pomme de 200 g et une balle de canon de 5 kg de la même hauteur, elles arriveront au sol en même temps, si on néglige la résistance de l'air.
, ne dépend pas de m. L'accélération gravitationnelle est la même pour un pomme de 200 g et une balle de canon de 5 kg. Si on laisse chuter un pomme de 200 g et une balle de canon de 5 kg de la même hauteur, elles arriveront au sol en même temps, si on néglige la résistance de l'air.
Par conséquent, un observateur en chute libre (un observateur qui se jette par la fenêtre en même temps qu'il jette la pomme) ne devrait mesurer aucune accélération, parce que le corps (la pomme) dont il essaie de mesurer l'accélération chute toujours à la même vitesse que lui. On appelle ceci le principe d’équivalence.
Dans l'ascenseur
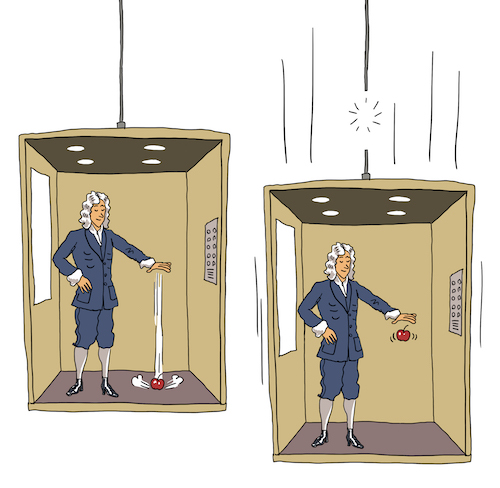
gauche : Figure 2a. Droite : Figure 2b
Crédit :
S. Cnudde
Cette conclusion pourrait paraître paradoxale. Imaginons que je suis dans un ascenseur. La raison on la comprendra plus tard. J’ai une pomme dans ma main, je la lâche, je vois bien qu’elle chute par terre (Fig 2a). Pourtant, dans ce cas-ci, le principe d’équivalence est mal appliqué parce que la pomme est en chute libre (si on néglige la résistance de l’air), alors que l’observateur a les pieds au sol. La résistance du sol agit sur lui et l'empêche de s’y enfoncer. Imaginez de refaire l’expérience dans un ascenseur au dernier étage et que le câble qui retient l’ascenseur se coupe juste avant que vous ne lâchiez la pomme (Fig. 2b). Alors, vous ne verrez pas la pomme chuter, parce que vous chuterez à la même vitesse qu’elle. Votre expérience (avant que vous vous écrasiez au sol quand l’ascenseur arrive au rez-de-chaussée) sera égale à celle que vous auriez faite si l’ascenseur avait été transporté dans l’espace et que vous étiez dans une situation d’apesanteur, c'est-à-dire d'absence de gravité.
Implications pour la nature de la gravité
Newton avait compris l’existence du principe d’équivalence, mais il n’avait pas su l’expliquer. Einstein réfléchit à l’expérience de l’ascenseur et il nota l'analogie avec le passager sur le train. Dans le train, la force apparente est absente quand le wagon roule par inertie, elle se manifeste quand une force réelle en modifie le mouvement. Dans l'ascenseur, la force de gravité est indétectable quand il est en chute libre, elle se manifeste quand une force agit sur l'ascenseur (la tension des cables qui retient la cabine).
Dans le train
Crédit :
S. Cnudde
Einstein en conclut que la gravité est une force apparente, qui se manifeste quand on utilise un référentiel qui n'est pas en chute libre et l'on se met du point de vue d'un observateur sujet à d'autres forces d'origine non-gravitationnelle
Mouvements et observateurs inertiels
Un mouvement est purement inertiel quand le corps qui se déplace n'est sujet à aucune force réelle. Un observateur inertiel est un observateur qui ne se déplace que par inertie. Dans le référentiel d'un tel observateur, il n'y a pas de forces apparentes.
En mécanique newtonienne, le principe d'inertie affirme que tout corps persévère dans son état de repos ou de mouvement uniforme en ligne droite, à moins qu'il ne soit contraint, par des forces s'imprimant sur lui, à changer cet état. Le mouvement inertiel étant rectiligne, il coïncide forcement avec le chemin le plus court entre deux points, dit aussi le chemin géodésique. La notion que le mouvement inertiel correspond au chemin géodésique continue à valoir dans la théorie de la relativité d'Einstein.
Einstein a, cependant, une notion de référentiel inertiel beaucoup plus étendue que Newton. Pour Newton, un observateur inertiel est un observateur sur lequel aucune force externe n’agit, donc un observateur isolé. Pour Einstein, un observateur inertiel est un observateur en chute libre, dans la mesure où il ne considère pas la gravité comme une force.
Deux visions de la géométrie
A la base de cette différence, il y a une perception différente de la géométrie. La géométrie est la description mathématique de l’espace. Pour Newton, la géométrie pré-existe à la physique. Que l’espace contienne de la matière ou qu’il soit vide ne change rien dans sa géométrie. Pour Einstein, l’espace n’est pas obligé d’obéir à la géométrie d’Euclide. C’est la matière qui, par sa distribution dans l’espace, en crée la géométrie.
La matière courbe le chemin géodésique
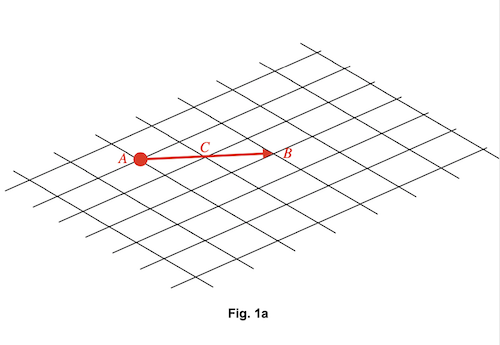
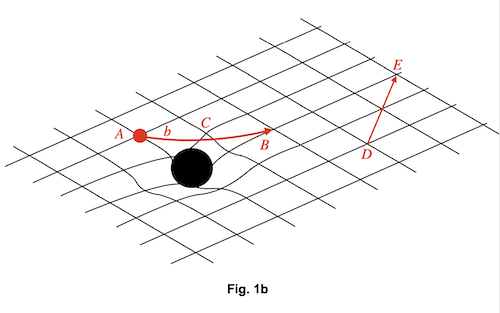
On peut comprendre la théorie d’Einstein en visualisant l’espace comme la surface d’un matelas, en deux dimensions, que nous supposons être plate quand personne ne s'assoit ou s'étend dessus. Si nous lançons une bille (représentée en rouge dans la figure en bas) sur un matelas quand celui-ci est vide, en absence de forces qui en perturbent le mouvement, la bille se déplacera sur la surface du matelas en empruntant le chemin le plus court – une ligne droite où la surface du matelas est plate (le chemin ACB pour aller de A à B en Fig. 1a). Si nous répétons l’expérience après avoir déposé sur le matelas une balle de bowling (la grosse sphère noire), alors la bille déviera dans la direction de la dépression créée dans le matelas par la balle de bowling et pourra même tomber dessus si sa vitesse n’est pas suffisamment grande (Fig. 2b). Le chemin géodésique pour aller de A à B sur la surface courbe ne passe plus par C.
Dans notre espace, en trois dimensions, un corps massif – la Terre, le Soleil ou un trou noir, – agit comme la balle de bowling. Il courbe localement la géométrie de l’espace, d’une manière que le chemin géodésique cesse d’être une ligne droite (nous avons mis en évidence le mot localement parce que la balle de bowling courbe le chemin entre A et B, elle ne courbe pas le chemin entre D et E).
Pensez à un vol Paris - Sidney. Le chemin le plus court parmi tous les parcours possibles est celui qui correspond à un grand cercle entre le point de départ et le point d’arrivée. Une droite n’est pas une option parce que le mouvement est obligé de suivre la surface bidimensionnelle de la Terre, qui est courbe (l’avion ne peut pas creuser un tunnel par le centre de la planète). Dans le cas de la théorie de la relativité générale d’Einstein, c’est l’espace tridimensionnel qui est courbe. La contrainte vient donc du fait que l’on est obligé de se déplacer dans l’espace, il n’est pas possible de se déplacer autrement.
Dans les images utilisées ci-dessus, du matelas ou des parcours en avion, l'espace considèré est en deux dimensions (surface du matelas ou surface de la Terre), alors que notre espace est en trois dimensions (longueur, largeur, hauteur), mais, dans le cas de la théorie de la relativité générale d’Einstein, c’est l’espace tridimensionnel qui est courbe.
Définition
Nous avons écrit que la présence de matière modifie la géométrie de l'espace. En fait, la propriété modifiée est la métrique, c'est-à-dire la loi qui donne la distance entre deux points.
La métrique euclidienne
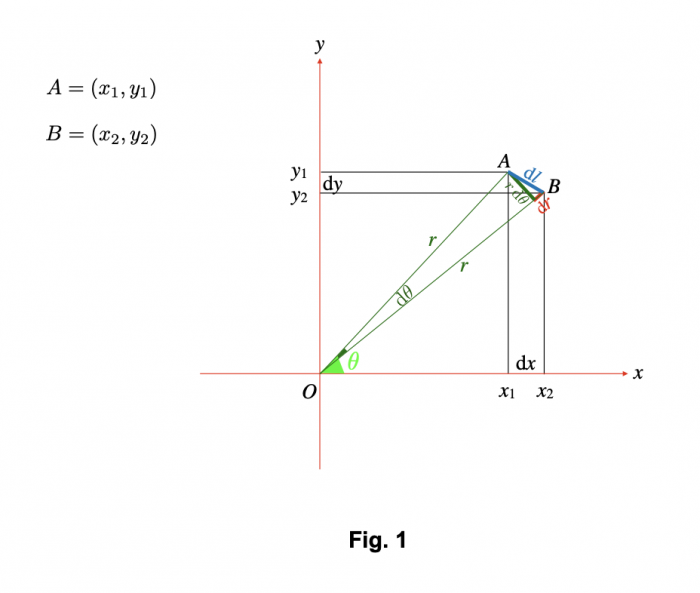
Commencons par le cas simple de deux points A et B de coordonnées  et
et  , respectivement sur le plan cartésien (Fig. 1). La distance dl entre les deux points est donnée par le théorème de Pythagore :
, respectivement sur le plan cartésien (Fig. 1). La distance dl entre les deux points est donnée par le théorème de Pythagore :
 (1),
(1),
où  et
et  .
.
Nous pouvons généraliser l'équation (1) au cas de deux points  et
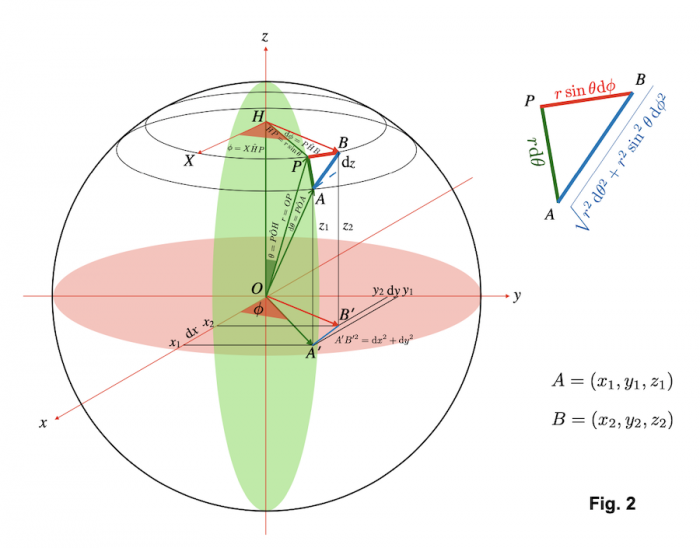
et  dans l'espace en trois dimensions. En appliquant deux fois le théorème de Pythagore (Fig. 2), nous trouvons :
dans l'espace en trois dimensions. En appliquant deux fois le théorème de Pythagore (Fig. 2), nous trouvons :
 (2).
(2).
Les équations (1) et (2) expriment la métrique euclienne, respectivement en deux et trois dimensions. La métrique euclidienne est la loi qui permet de calculer la distance dl entre deux points quelconques dans la géométrie d'Euclide.
Les équations (1) et (2) sont formulées en coordonnées cartésiennes orthogonales. On aurait pu considérer d'autres systèmes de coordonnées, par exemple, en deux dimensions, les coordonnées polaires. En coordonnées polaires (Fig. 2), un point A est identifié par deux coordonnées : la distance r de l'origine O et l'angle  que la droite OA forme avec une droite de référence (en Fig. 1, l'axe x). Dans ce système de coordonnées, la distance
que la droite OA forme avec une droite de référence (en Fig. 1, l'axe x). Dans ce système de coordonnées, la distance  entre les points
entre les points  et
et  est déterminée par l'équation :
est déterminée par l'équation :
 (3),
(3),
qui exprime, encore une fois, le théorème de Pythagore, cette fois en coordonnées polaires (on note qu’en Fig.1  ).
).
Cépendant, un changement de coordonnées n'est pas un changement de métrique. Les équations (1) et (3) ont des formes différentes, mais elles correspondent à la même métrique parce qu'elles donnent le même résultat pour la distance  entre deux points*. Un changement de métrique est – nous le verrons bientôt – quelque chose de plus profond.
entre deux points*. Un changement de métrique est – nous le verrons bientôt – quelque chose de plus profond.
*Affirmer que les équations (1) et (3) donnent le même résultat pour la longeuer  est correct dans la limite que
est correct dans la limite que  est infinitésimale. Autrement, on ne peut pas traiter l'arc de cercle de longueur
est infinitésimale. Autrement, on ne peut pas traiter l'arc de cercle de longueur  comme un segment et l'on ne peut pas supposer qu'il soit perpendiculaire au segment de longueur
comme un segment et l'on ne peut pas supposer qu'il soit perpendiculaire au segment de longueur  .
.
La métrique sur une sphère
Pour comprendre comment la métrique peut différer de celle d'Euclide, considérons la géométrie sur une surface sphérique (par exemple, le globe terrestre; Fig. 2).
Un lieu sur la surface de la sphère est identifié par deux coordonnées : la co-latitude*  et la longitude
et la longitude  , étant donné que la distance r du centre de la Terre est la même pour tous les points. A
, étant donné que la distance r du centre de la Terre est la même pour tous les points. A  , constante, une variation infinitésimale
, constante, une variation infinitésimale  de la latitude correspond à un déplacement de
de la latitude correspond à un déplacement de  , si les angles sont exprimés en radians. A
, si les angles sont exprimés en radians. A  constante, une variation infinitésimale
constante, une variation infinitésimale  de la longitude correspond à un déplacement de
de la longitude correspond à un déplacement de  . Dans la limite où des arcs infinitésimaux peuvent être considérés comme rectilignes, le théorème de Pythagore donne :
. Dans la limite où des arcs infinitésimaux peuvent être considérés comme rectilignes, le théorème de Pythagore donne :
 (4).
(4).
L'équation (4) est fondamentalement différente des équations (1) et (3). Les équations (1) et (3) donnent la distance entre deux points sur le plan, donc une surface plate. L'équation (4) donne l'élément infinitésimal de distance sur une sphère, donc une surface courbe.
Pour mieux comprendre cette différence, considérons la distance l entre le pôle Nord et le pôle Sud de la Terre : l est le diamètre terrestre si on voit les pôles comme deux points dans l'espace en trois dimensions et le méridien terrestre si on voit les pôles comme deux points sur la surface terrestre. La métrique (2) correspond au premier cas,  . La métrique (4) correspond au deuxième cas,
. La métrique (4) correspond au deuxième cas,  . La métrique (4) est non-euclidienne parce qu'elle mesure les distances sur une surface courbe.
. La métrique (4) est non-euclidienne parce qu'elle mesure les distances sur une surface courbe.
Pour résumer, l'équation (1) donne la métrique sur une surface plate. L'équation (2) donne la métrique dans un espace plat (en espace qui obéit à la géométrie d'Euclide).
La notion de distance sur une surface peut être généralisée à des surfaces courbes. C'est comme ça que l'on passe de la métrique (1) à la métrique (4).
De la même manière, la notion de distance dans l'espace en trois dimensions (équation 2) peut être généralisée à des espaces courbes, qui correspondent à des métriques plus complexes et n'obéissant pas à la géométrie d'Euclide.
* : La latitude utilisée en géographie est l’angle avec le plan équatorial. Elle est nulle à l’équateur. En géométrie et en physique, on utilise plutôt la co-latitude, qui est l’angle avec l’axe polaire. Elle est nulle au pôle nord.
La quatrième dimension
L'équation (6) vous semble complexe ? Les métriques utilisées dans la théorie de la relativité d’Einstein le sont encore plus, parce qu'elles considérent non seulement l'espace, mais aussi l’espace-temps. Dans la théorie de la relativité, c’est le mouvement dans l’espace-temps et non pas le mouvement purement spatial qui nous intéresse.
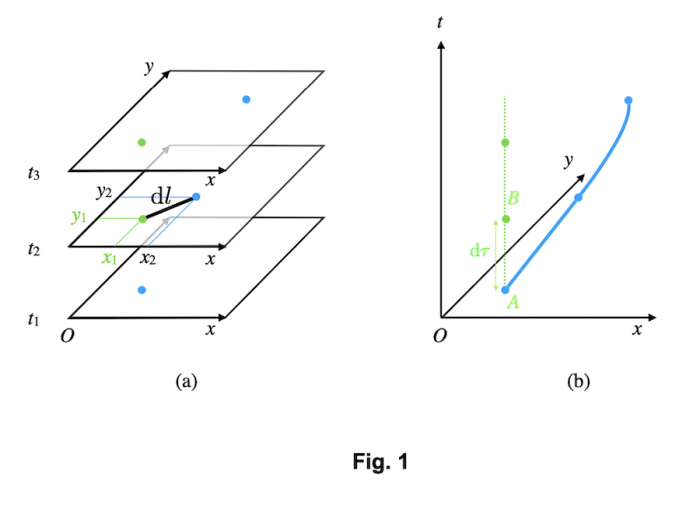
Pour comprendre ce qu’est l’espace-temps, considérons un corps – par exemple, une boule de billard – qui se déplace sur une surface. Vous pouvez imaginer son mouvement comme une série de photographies instantanées qui montrent sa position (Fig. 1a, cercles bleus pleins) aux temps  ,
,  ,
,  , etc. Imaginez maintenant d’empiler toutes ces photographies instantanées et de tracer une courbe qui connecte les positions du corps dans toutes les photographies instantanées empilées (Fig 1b, courbe bleue continue). Voici la trajectoire du corps dans l’espace-temps. En relativité, on appelle cette trajectoire une ligne d'univers.
, etc. Imaginez maintenant d’empiler toutes ces photographies instantanées et de tracer une courbe qui connecte les positions du corps dans toutes les photographies instantanées empilées (Fig 1b, courbe bleue continue). Voici la trajectoire du corps dans l’espace-temps. En relativité, on appelle cette trajectoire une ligne d'univers.
La Fig. 1b montre une image en trois dimensions (deux dimension spatiales et une dimension temporelle) parce que nous ne nous pouvons pas visualiser une image en quatre dimensions. L'espace-temps réel a quatre dimensions parce l'espace en a trois (les corps ne sont pas contraints à se déplacer sur une surface).
Le temps propre
Soit  , que nous considérons comme un intervalle de temps infinitésimal, et soient dx, dy, dz les variations entre
, que nous considérons comme un intervalle de temps infinitésimal, et soient dx, dy, dz les variations entre  et
et  des coordonnées spatiales du corps représenté par le cercle bleu en Fig. 1.
des coordonnées spatiales du corps représenté par le cercle bleu en Fig. 1.
La distance dl parcourue par le corps dans l'intervalle de temps dt est donnée par  , qui se réduit à
, qui se réduit à  pour la métrique euclidienne en coordonnées cartésiennes. En Fig. 1, les cercles verts montrent la position initiale du corps ; d
pour la métrique euclidienne en coordonnées cartésiennes. En Fig. 1, les cercles verts montrent la position initiale du corps ; d est le déplacement par rapport à la position initiale.
est le déplacement par rapport à la position initiale.
La ligne verte pointillée (Fig. 1b) est la ligne d'univers pour un corps au repos, pour lequel  . Pour ce corps, le seul changement est le temps
. Pour ce corps, le seul changement est le temps  qui s'écoule entre les évènements* A et B. Ce temps-ci est appelé temps propre, parce que c’est le temps dans le référentiel du corps (le référentiel dans lequel le corps est au repos). Le temps propre est indiqué avec la lettre grecque
qui s'écoule entre les évènements* A et B. Ce temps-ci est appelé temps propre, parce que c’est le temps dans le référentiel du corps (le référentiel dans lequel le corps est au repos). Le temps propre est indiqué avec la lettre grecque  pour le distinguer du temps t dans le référentiel de l'observateur . La théorie de la relativité s'appelle comme ça parce que le temps n'est pas absolu. Son écoulement dépend de l'observateur qui le mesure.
pour le distinguer du temps t dans le référentiel de l'observateur . La théorie de la relativité s'appelle comme ça parce que le temps n'est pas absolu. Son écoulement dépend de l'observateur qui le mesure.
Dans le référentiel dans lequel un corps est au repos,  par définition, mais comment mettre en relation le temps propre
par définition, mais comment mettre en relation le temps propre  mesuré par un astronaute qui voyage dans un vaisseau spatial avec le temps t mésuré par un observateur externe, pour lequel l'astronaute se déplace à grande vitesse ? Les transformations de Lorentz répondent à cette question.
mesuré par un astronaute qui voyage dans un vaisseau spatial avec le temps t mésuré par un observateur externe, pour lequel l'astronaute se déplace à grande vitesse ? Les transformations de Lorentz répondent à cette question.
* : *En relativité, un événement est la présence d’un corps dans un point de l’espace à un temps donné (la présence de Telleyrand au Congrès de Vienne en 1815 est un événement).
Les transformations de Lorentz
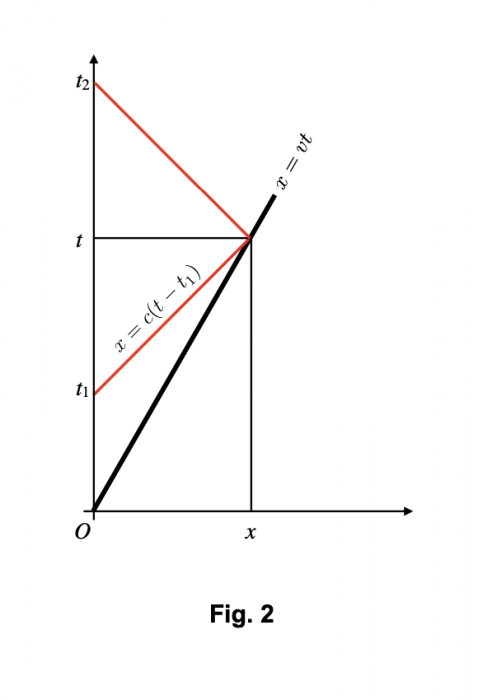
Considérons un astronef qui part de la planète O et qui voyage à vitesse v constante dans la direction de l'axe x. La planète O se situe à  . L'astronaute qui pilote l'astronef et la tour de contrôle sur O ont synchronisé leurs montres à l'instant de départ
. L'astronaute qui pilote l'astronef et la tour de contrôle sur O ont synchronisé leurs montres à l'instant de départ  . Pour la tour de contrôle, l'abscisse de l'astronef au temps t est
. Pour la tour de contrôle, l'abscisse de l'astronef au temps t est  . La ligne droite noire épaisse en Fig. 2 montre la relation entre x et t pour l'astronef dans le référentiel de la tour de contrôle.
. La ligne droite noire épaisse en Fig. 2 montre la relation entre x et t pour l'astronef dans le référentiel de la tour de contrôle.
Au temps  dans son référentiel, la tour de contrôle envoie un message radio à l'astronaute. Le message radio se propage à la vitesse de la lumière (les ondes radio sont des ondes électromagnétiques), donc il va plus vite que l'astronef, même s'il part plus tard. Au temps
dans son référentiel, la tour de contrôle envoie un message radio à l'astronaute. Le message radio se propage à la vitesse de la lumière (les ondes radio sont des ondes électromagnétiques), donc il va plus vite que l'astronef, même s'il part plus tard. Au temps  , le message radio a parcouru une distance
, le message radio a parcouru une distance  (cette équation correspond à la ligne rouge continue). Quand le message parvient à l'atronaute, l'astronaute répond tout de suite. Les traits rouges montrent la ligne d'univers du message de réponse. La tour de contrôle reçoit la réponse au temps
(cette équation correspond à la ligne rouge continue). Quand le message parvient à l'atronaute, l'astronaute répond tout de suite. Les traits rouges montrent la ligne d'univers du message de réponse. La tour de contrôle reçoit la réponse au temps  . Nous allons analyser ces événements, d'abord de la perspective de la tour de contrôle, puis de celle de l'astronaute.
. Nous allons analyser ces événements, d'abord de la perspective de la tour de contrôle, puis de celle de l'astronaute.
La Fig. 2 utilise le référentiel de la tour de contrôle. Pour déterminer quand l'astronaute reçoit le message, la tour du contrôle cherche à quel temps t la distance parcourue par le signal radio est égale à celle parcourue par l'astronef. La condition  donne
donne  et donc :
et donc :
 (1).
(1).
Nous avons supposé que l'astronaute répond tout de suite. Donc la distance x entre l'astronef et O est la même quand l'astronaute reçoit le message de la tour et quand il envoie sa réponse. Comme la distance x parcourue par le signal radio est la même dans les deux sens, le temps  que le message de l'astronaute prend pour parvenir à la tour de contrôle est égal au temps
que le message de l'astronaute prend pour parvenir à la tour de contrôle est égal au temps  que le message de la tour prend pour parvenir à l'astronaute. La condition
que le message de la tour prend pour parvenir à l'astronaute. La condition  donne :
donne :
 (2).
(2).
Soit  le temps affiché par la montre de l'astronaute quand il reçoit le message de la tour de contrôle. En appliquant le même argument qui amène le personnel de la tour à écrire l'équation (1), l'astronaute conclut que la tour recevra sa réponse au temps :
le temps affiché par la montre de l'astronaute quand il reçoit le message de la tour de contrôle. En appliquant le même argument qui amène le personnel de la tour à écrire l'équation (1), l'astronaute conclut que la tour recevra sa réponse au temps :
 (3)
(3)
La question est quelle est la relation entre les temps  et
et  mesurés par l'astronaute et les temps
mesurés par l'astronaute et les temps  et
et  mesurés par la tour. Nous y répondrons en déterminant la valeur du paramètre
mesurés par la tour. Nous y répondrons en déterminant la valeur du paramètre  . Notre calcul se base sur un argument de réciprocité. Si le temps
. Notre calcul se base sur un argument de réciprocité. Si le temps  auquel l'astronaute reçoit le message dans son référentiel est k fois le temps t que la tour a calculé dans son référentiel, alors le temps
auquel l'astronaute reçoit le message dans son référentiel est k fois le temps t que la tour a calculé dans son référentiel, alors le temps  auquel la tour reçoit le message de réponse devra être k fois le temps de réception
auquel la tour reçoit le message de réponse devra être k fois le temps de réception  calculé par l'astronaute. Donc :
calculé par l'astronaute. Donc :
 (4),
(4),
où nous avons utilisé (dans l'ordre) l'équation (3), la relation  et l'équation (1). Les temps
et l'équation (1). Les temps  calculés avec l'équation (4) et l'équation (2) doivent être égaux. En posant :
calculés avec l'équation (4) et l'équation (2) doivent être égaux. En posant :
 (5)
(5)
on trouve  et donc :
et donc :
![\tau^2=\left[1-\left({v\over c}\right)^2\right]t^2](../pages_gravite/equations_gravite-nature/equation96.png) (6).
(6).
Dans le cas limite  , l'équation (1) donne
, l'équation (1) donne  pour n'importe quelle valeur de dt. Pour quelqu'un qui va à la vitesse de la lumière, le temps ne passe pas ! Cela est pourtant impossible pour un corps massif, tel que notre astronef, parce que l'énergie qu'il faudrait pour l'amener à la vitesse de la lumière est infinie. La lumière n'a pas de masse.
pour n'importe quelle valeur de dt. Pour quelqu'un qui va à la vitesse de la lumière, le temps ne passe pas ! Cela est pourtant impossible pour un corps massif, tel que notre astronef, parce que l'énergie qu'il faudrait pour l'amener à la vitesse de la lumière est infinie. La lumière n'a pas de masse.
Notre raisonomment ne contient aucune hypothèse sur la durée du temps t, qui pourrait être très long ou très court. Nous pouvons donc remplacer les temps  et
et  par les temps infinitésimaux
par les temps infinitésimaux  et
et  , et réécrire l'équation (6) dans la forme :
, et réécrire l'équation (6) dans la forme :
![{\rm d}\tau^2=\left[1-\left({v\over c}\right)^2\right]{\rm\,d}t^2](../pages_gravite/equations_gravite-nature/equation103.png) (7).
(7).
L'équation (7) est plus générale, parce qu'elle s'applique aussi à des mouvements qui ne sont pas rectilignes uniformes. Même si la vitesse v de l'astronef change avec le temps, elle peut toujours être considérée constante dans des intervalles de temps infinitésimaux. L'équation (7) est connue comme la transformation de Lorentz pour le temps (il y en a une deuxième pour les longueurs).
La vitesse est le déplacement par unité de temps :
 (8).
(8).
En replaçant la vitesse v donnée par l'équation (8) dans l'équation (7), nous trouvons l'expression finale pour le temps propre :
 (9),
(9),
qui sera à la base de la discussion qui suit.
Passé, présent, futur
L'importance de l'équation (9) est qu'elle nous donne une métrique spatio-temporelle (dite la métrique de Minkowski), par laquelle nous pouvons mesurer la séparation entre deux évenements.
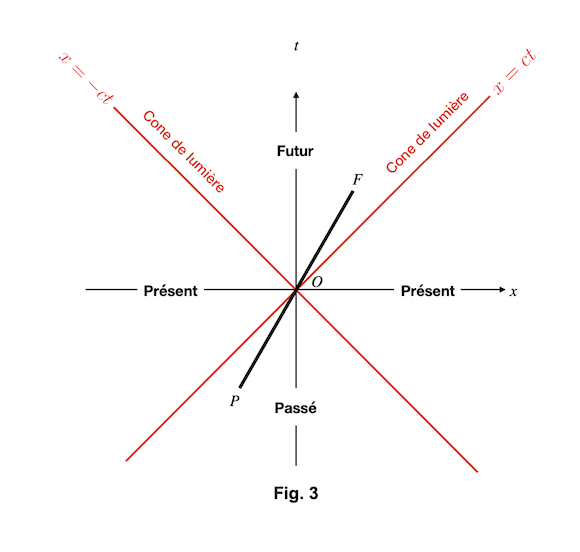
Considérons un point O dans l'espace-temps. Les courbes noires en Fig. 3 nous montrent des trajectoires possibles pour des corps matériaux (massifs). Les lignes rouges correspondent aux trajectoires des rayons lumineux. Ensemble, la totalité des lignes rouges forme une surface biconique, qui définit le cône de lumière de l'événement O. Les lignes jaunes correspondent à des trajectoires interdites. Pour les parcourir, il faudrait se déplacer plus vite que la lumière.
Le passé de l'événement O sont tous les événements dont O aurait pu venir à connaissance et qui auraient pu l'influencer. Pour qu'un événement P puisse influencer O, il faut que de la matière ou de la lumière puisse aller de P à O. P doit donc se situer dans le cône de lumière inférieur, qui correspond au passé de O.
Le futur de O sont tous les événements qui pourront être influencés par O. Pour qu'un événement F puisse être influencé par O, il faut que de la matière ou de la lumière puisse aller de O à F. F doit donc se situer dans le cône de lumière supérieur, qui correspond au futur de O.
Le présent de O sont tous les événements qui n'appartiennent ni à son passé ni à son futur, c'est-à-dire tout ce qui est en dehors son cône de lumière.
L'équation (9) montre que la "distance" spatio-temporelle  entre O et n'importe quel point sur la surface du cône de lumière est nulle. Avec la définition de distance (c'est-à-dire avec la métrique) en équation (9), la distances entre O et les points A et B en Fig. 3 sont nulles. Cela est logique. Les chemins AO et OB correpondent aux trajectoires d'un rayon de lumière. Pour la lumière, le temps ne passe pas. Donc, pour elle, ces chemins prennent un temps
entre O et n'importe quel point sur la surface du cône de lumière est nulle. Avec la définition de distance (c'est-à-dire avec la métrique) en équation (9), la distances entre O et les points A et B en Fig. 3 sont nulles. Cela est logique. Les chemins AO et OB correpondent aux trajectoires d'un rayon de lumière. Pour la lumière, le temps ne passe pas. Donc, pour elle, ces chemins prennent un temps  .
.
La distance temporelle, en temps propre, entre P et O ou entre O et F est donnée par  . Le point C appartient au présent de F. La distance temporelle, en temps propre, entre O et C ne correspond à aucun nombre réel parce que, pour les points en dehors du cône de lumière,
. Le point C appartient au présent de F. La distance temporelle, en temps propre, entre O et C ne correspond à aucun nombre réel parce que, pour les points en dehors du cône de lumière,  . La distance entre les événements O et C n'est pas temporelle, mais spatiale.
. La distance entre les événements O et C n'est pas temporelle, mais spatiale.
De la même manière que nous avons introduit l'intervalle de temps propre  , nous aurions pû introduire la distance propre
, nous aurions pû introduire la distance propre  , qui est définie pour tous les événements dans le présent de O, mais devient imaginaire pour les événements passés ou futurs.
, qui est définie pour tous les événements dans le présent de O, mais devient imaginaire pour les événements passés ou futurs.
En conclusion, la métrique relativiste en équation (9) permet de définir une distance en quatre dimensions entre un observateur O et n'importe quel autre événement dans l'espace-temps (un observateur est un événement parce que l'observation est toujours faite à un temps et dans un endroit précis). La distance est temporelle ( ) pour les événements passés ou futurs. Elle est spatiale (
) pour les événements passés ou futurs. Elle est spatiale ( ) pour les événements présents.
) pour les événements présents.
De la relativité restreinte à la relativité générale
La métrique de Minkowski en équation (9) est la métrique de la théorie de la relativité restreinte. Elle prend en compte la relativité de l'espace et du temps, mais elle est restreinte à un univers plat, qui suit la géométrie euclidienne. Elle ne prend pas en compte les effets de la gravité.
Pour prendre en compte la gravité, il faut passer de la théorie de la relativité restreinte à la théorie de la relativité générale, c'est-à-dire à une métrique plus complexe, de la forme :
 (10),
(10),
où  ,
,  et
et  sont les coordonnées spatiales, qui peuvent être les coordonnées cartesiennes orthogonales x, y et z, mais qui pourraient aussi être des coordonnées sphériques, cylindriques, etc.
sont les coordonnées spatiales, qui peuvent être les coordonnées cartesiennes orthogonales x, y et z, mais qui pourraient aussi être des coordonnées sphériques, cylindriques, etc.
On note que, par cohérence dimensionnelle, les coefficients de la métrique ne peuvent pas tous avoir les mêmes unités. Dans la métrique de Minkowski :
 ,
,  (11)
(11)
Avoir  ,
,  ,
,  ,
,  est une propriété générale des métriques dans la théorie de la relativité.
est une propriété générale des métriques dans la théorie de la relativité.
Pour résumer, dans le cas de la théorie de la relativité générale, le mouvement inertiel est le mouvement géodésique. Le chemin géodésique est déterminé par la géométrie et la géométrie est déterminée par la distribution de la matière, qui déforme la structure de l’espace-temps. Une pomme qui chute d’un arbre et la Terre qui tourne autour du Soleil décrivent toutes les deux un chemin géodésique dans leur espace-temps courbe.
 entre le point de coordonnées
entre le point de coordonnées  et le point de coordonnées
et le point de coordonnées  est donnée par la formule :
est donnée par la formule :
 (5).
(5).
 dans l'équation (5) définit la métrique. Dans un système de coordonnées cartesiennes orthogonales,
dans l'équation (5) définit la métrique. Dans un système de coordonnées cartesiennes orthogonales,  ,
,  et
et  . Dans ce système de coordonnées, la métrique euclidienne prend la forme très simple
. Dans ce système de coordonnées, la métrique euclidienne prend la forme très simple  et
et  pour
pour  .
.
 disparaissent localement. On peut démontrer que cette propriété se déduit de la symétrie de la métrique, c'est-à-dire du fait que la distance entre A et B doit être égale à la distance entre B et A. Pour cette raison, nous ne considérerons que des métriques de la forme (dite diagonale) :
disparaissent localement. On peut démontrer que cette propriété se déduit de la symétrie de la métrique, c'est-à-dire du fait que la distance entre A et B doit être égale à la distance entre B et A. Pour cette raison, nous ne considérerons que des métriques de la forme (dite diagonale) :
 (6).
(6).
 ,
,  et
et  . Nous laissons au lecteur l'exercice de calculer les valeurs des coefficients
. Nous laissons au lecteur l'exercice de calculer les valeurs des coefficients  ,
,  ,
,  pour la métrique euclidienne dans un tel système de coordonnées.
pour la métrique euclidienne dans un tel système de coordonnées.
 ,
,  ,
,  ,
,  ) et donc la forme du chemin géodésique que les corps vont parcourir sous l'effet de la gravité.
) et donc la forme du chemin géodésique que les corps vont parcourir sous l'effet de la gravité.
 de la métrique est l'équivalent en relativité générale du potentiel gravitationnel en mécanique classique). Notre cours n'a pourtant pas l'objectif de développer des habilités calculatoires. Le but est plutôt de faire comprendre la structure de la théorie de la relativité générale et la conception différente de la gravitation par rapport à la mécanique classique.
de la métrique est l'équivalent en relativité générale du potentiel gravitationnel en mécanique classique). Notre cours n'a pourtant pas l'objectif de développer des habilités calculatoires. Le but est plutôt de faire comprendre la structure de la théorie de la relativité générale et la conception différente de la gravitation par rapport à la mécanique classique.