Algèbre
- Introduction
- Anneaux des polynômes et fractions
- Une factorisation du polynôme de la méthode de Laplace
- Ex: Une factorisation du polynôme de la méthode de Laplace
- Les racines des polynômes de Legendre
- Ex: Les racines des polynômes de Legendre
- Systèmes linéaires
- Configurations d'équilibre de satellites co-orbitaux
- Ex: Configurations d'équilibre de satellites co-orbitaux
- En savoir plus: Configurations d'équilibre de satellites co-orbitaux
- Exposants de Lyapunov
- Ex: exposants de Lyapunov
- Applications linéaires et matrices
- Système de Laplace-Lagrange
- Ex: Système de Laplace-Lagrange
- Pendule et matrice de Floquet
- Ex: Pendule et matrice de Floquet
- Lever et coucher du Soleil
- Ex: Lever et coucher du Soleil
- Etoiles doubles
- Ex: Etoiles doubles
- Théorie Spectrale
- Onde de Langmuir
- Ex: Onde de Langmuir
- Filtrage de Wiener
- Ex: Filtrage de Wiener
- Groupe quotient
- Phénomènes mutuels
- Ex: Phénomènes mutuels
- Atome de Bohr
- Ex: Atome de Bohr
- Cycles astronomiques et fractions continues
- Ex: Cycles astronomiques et fractions continues
Introduction
On trouvera dans cette partie des exercices portant sur :
- Une factorisation du polynôme de Laplace pour la détermination d'orbites
- L'utilisation de la notion de l'ordre d'une racine pour les racines des polynômes de Legendre
- Les systèmes linéaires, appliqués aux configurations d'équilibre de satellites co-orbitaux (qui généralisent le problème des points de Lagrange)
- Stabilité d'un système dynamique (exposants de Lyapunov)
- Perturbations mutuelles des mouvements de Jupiter et Saturne (diagonalisation de matrice)
- Les mouvements de la Lune (pendule et matrice de Floquet)
- La détermination des heures de lever et de coucher du Soleil
- L'étude du mouvement d'étoiles doubles
- L'étude des ondes de Langmuir dans les plasmas
- Le filtrage de Wiener en traitement d'images
- Les équations diophantiennes, appliquées à des calculs de configurations planétaires
- Les modèles d'atome de Rutherford et de Bohr
- Le calendrier grégorien (fractions continues)
- Le cycle de Saros (fractions continues)
Anneaux des polynômes et fractions
Auteur: Alain Vienne
Une factorisation du polynôme de la méthode de Laplace
Auteur: Alain Vienne
Lors de la découverte d'un nouvel objet dans le système solaire, on souhaite rapidement connaitre sa trajectoire. Celle-ci est généralement héliocentrique et, dans un premier temps, on la suppose képlérienne. Or les observations terrestres donnent uniquement la direction de l'astre mais pas sa distance. La méthode de Laplace propose un moyen qui, à partir de 3 observations de direction faites à des dates assez rapprochées, donne les vecteurs position et la vitesse de l'astre. Le détail de la méthode peut être vu dans le cours suivant: Dynamique du système solaire. On peut y voir notamment que la méthode conduit à chercher les racines d'un polynôme de degré 8.

Il y est affirmé qu'il y a 4 racines réelles (1 négative, 3 positives) et 4 complexes non réelles. Cette affirmation est étudiée et montrée dans l'exercice Les racines du polynôme de la méthode de Laplace. Ici, on montre que  où
où  est la distance Terre-Soleil, et, on utilise cette racine pour factoriser le polynôme.
est la distance Terre-Soleil, et, on utilise cette racine pour factoriser le polynôme.
Voici à titre d'exemple le graphe du polynôme dans le cas de 3 observations de Jupiter à son opposition (courbe "complète" et un agrandissement):
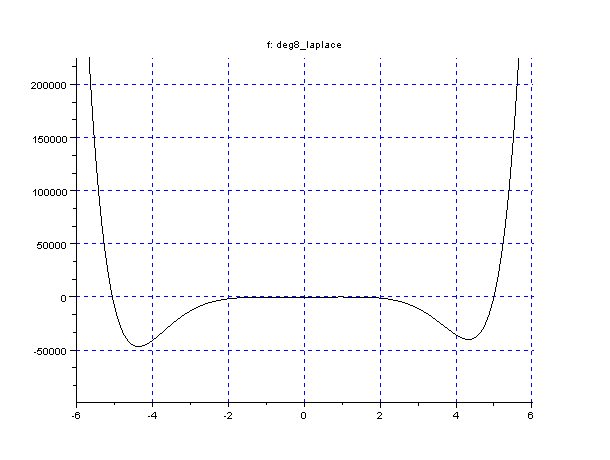
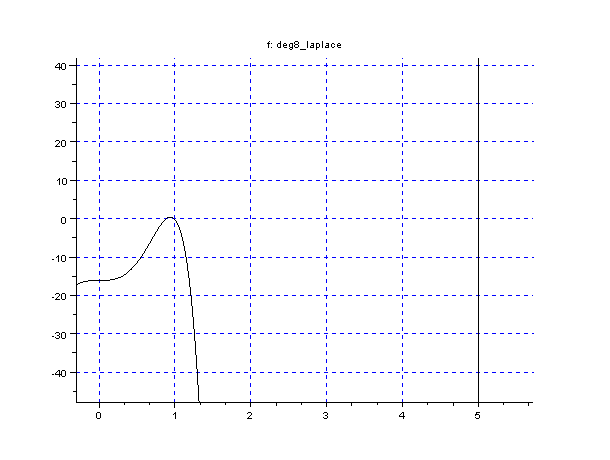
Le polynome de la méthode de Laplace dans le cas de 3 observations de Jupiter (courbe "complète" et un agrandissement). L'axe horizontal est gradué en ua. On note que ce polynôme n'est pas très bien conditionné car la vue d'ensemble ne donne pas une idée des racines ni même du nombre de ces racines. La deuxième figure est agrandissement sur la partie utile. On note la racine

ua (

) et les 2 autres racines dont celle à 5 ua.
Ex: Une factorisation du polynôme de la méthode de Laplace
Auteur: Alain Vienne
 Factorisation du polynôme de la méthode de Laplace
Factorisation du polynôme de la méthode de Laplace
Difficulté : ☆
Temps : 30mn
Le polynôme issu de la méthode de Laplace a la forme suivante:

où  est la distance Terre-Soleil et
est la distance Terre-Soleil et  .
.
 et
et  sont des coefficients réels issus de la géométrie du problème.
sont des coefficients réels issus de la géométrie du problème.
Question 1)
Vérifier que  est racine de
est racine de  .
.
Question 2)
Mettre en facteur  dans
dans  .
.
Faire le changement de variables  pour éliminer les fractions.
pour éliminer les fractions.
Les racines des polynômes de Legendre
Auteur: Alain Vienne
En Mécanique Céleste, on est souvent conduit à utiliser les polynômes de Legendre que l'on note ici  .
.
C'est le cas, par exemple, dans le développement du potentiel terrestre. Si on suppose que la Terre est un sphéroïde, le potentiel peut s'écrire:
![U(r,\varphi)=\frac{KM_T}{r} \ [1 - \sum_{m=1}^{\infty} J_{2m} (\frac{a_e}{r})^{2m} P_{2m}(\sin\varphi) \ ]](../pages_poly/equations_poly/equation23.png)
 est la constante de gravitation de la Terre,
est la constante de gravitation de la Terre,  la masse totale de la Terre,
la masse totale de la Terre,  son rayon équatorial et
son rayon équatorial et  des coefficients numériques.
des coefficients numériques.  et
et  sont le rayon et la latitude du point pour lequel on évalue le potentiel
sont le rayon et la latitude du point pour lequel on évalue le potentiel  .
.
Un autre exemple d'utilisation est de considérer 2 corps  et
et  décrivant autour d'un centre
décrivant autour d'un centre  des orbites proches d'un mouvement elliptique. Pour décrire les perturbations (gravitationnelles) entre
des orbites proches d'un mouvement elliptique. Pour décrire les perturbations (gravitationnelles) entre  et
et  , on doit écrire l'inverse de la dsitance entre
, on doit écrire l'inverse de la dsitance entre  et
et  ,
,  , en fonction de leurs éléments d'orbite. On montre facilement que:
, en fonction de leurs éléments d'orbite. On montre facilement que:
Avec  ,
,  ,
,  et
et  l'angle entre
l'angle entre  et
et  vu de
vu de  .
.
Cette dernière expression est développée en puissance de  grâce aux polynômes de Legendre:
grâce aux polynômes de Legendre:

Ce développement est rapidement convergent si  est petit. C'est le cas si, par exemple,
est petit. C'est le cas si, par exemple,  est la Terre,
est la Terre,  le Soleil et
le Soleil et  un satellite artificiel.
un satellite artificiel.
Plus de détails de ces développement peuvent être vus dans le cours de Mécanique Céleste de Luc Duriez.
Les polynômes de Legendre ont de nombreuses propriétés. Celle que nous allons utiliser dans l'exercice qui suit est la formule de Rodrigues:
Cette formule va nous permettre de montrer que l'équation  a toutes ses racines dans
a toutes ses racines dans ![[-1,+1]](../pages_poly/equations_poly/equation55.png) et en a
et en a  distinctes.
distinctes.
Ex: Les racines des polynômes de Legendre
Auteur: Alain Vienne
Les racines des polynômes de Legendre
Difficulté : ☆☆
Temps : 1h (pour une rédaction correcte)
Les polynômes de Legendre, bien connus en Mécanique Céleste, peuvent se déterminer par la formule de Rodrigues:
Systèmes linéaires
Auteurs: S. Renner, Marc Fouchard
Configurations d'équilibre de satellites co-orbitaux
Auteur: S. Renner
Date de création: 8 avril 2009
Dans le système solaire, on trouve plusieurs exemples de configurations où des petits satellites co-orbitaux sont en orbite autour d'un corps central (planète) beaucoup plus massif. Dans le système de Saturne, les satellites Hélène et Pollux sont en libration autour des points de Lagrange  et
et  de Dioné. De même, Télesto et Calypso sont respectivement au point
de Dioné. De même, Télesto et Calypso sont respectivement au point  et
et  de Téthys. D'autre part, les satellites co-orbitaux Janus et Epiméthée ont des orbites en fer à cheval (cf. figure des points de Lagrange) autour
de leur point
de Téthys. D'autre part, les satellites co-orbitaux Janus et Epiméthée ont des orbites en fer à cheval (cf. figure des points de Lagrange) autour
de leur point  mutuel.
mutuel.
Dans un autre contexte, la présence de 4 arcs de matière (des "morceaux" d'anneau) autour de Neptune pourrait s'expliquer par l'existence de satellites co-orbitaux (non découverts) qui confineraient la poussière observée de l'anneau formant les arcs.
Le but ici est de redémontrer des résultats généraux sur les configurations stationnaires (planes) de  satellites co-orbitaux, en orbite autour
d'une planète beaucoup plus massive (problème à
satellites co-orbitaux, en orbite autour
d'une planète beaucoup plus massive (problème à  corps, plan). Ces résultats généralisent le problème des points de Lagrange et sont extraits de Renner, S. & Sicardy, B., Celestial Mechanics and Dynamical Astronomy, 88, 397-414, 2004.
corps, plan). Ces résultats généralisent le problème des points de Lagrange et sont extraits de Renner, S. & Sicardy, B., Celestial Mechanics and Dynamical Astronomy, 88, 397-414, 2004.
Plus précisément, on va montrer que l'existence de solutions stationnaires planes pour le problème à  corps dépend de la parité de
corps dépend de la parité de  . Plus précisément, si
. Plus précisément, si  est impair, et pour une configuration angulaire donnée, il existe toujours un ensemble de masses (positives ou négatives) qui réalise un équilibre! Pour
est impair, et pour une configuration angulaire donnée, il existe toujours un ensemble de masses (positives ou négatives) qui réalise un équilibre! Pour  pair au contraire, il n'y a à priori pas de combinaison de masses qui réalise un équilibre, pour des séparations angulaires données entre les satellites.
pair au contraire, il n'y a à priori pas de combinaison de masses qui réalise un équilibre, pour des séparations angulaires données entre les satellites.
Ex: Configurations d'équilibre de satellites co-orbitaux
Auteur: S. Renner
Equilibres de satellites co-orbitaux
Difficulté : ☆☆
Temps : 2h30
On considère  satellites co-orbitaux en orbite autour d'un corps central supposé ponctuel de masse M. On note
satellites co-orbitaux en orbite autour d'un corps central supposé ponctuel de masse M. On note  la vitesse angulaire moyenne et
la vitesse angulaire moyenne et  le rayon orbital moyen des satellites.
le rayon orbital moyen des satellites.
On suppose le problème plan, et on se place dans un repère centré sur M et tournant à la vitesse angulaire  .
.
Le mouvement de chaque satellite est décrit par les coordonnées  ,
,  , où
, où  est la longitude du satellite i par rapport à une longitude de référence arbitraire, et
est la longitude du satellite i par rapport à une longitude de référence arbitraire, et  l'excursion radiale relative du satellite par rapport au rayon moyen
l'excursion radiale relative du satellite par rapport au rayon moyen  (voir figure ci-dessous).
(voir figure ci-dessous).
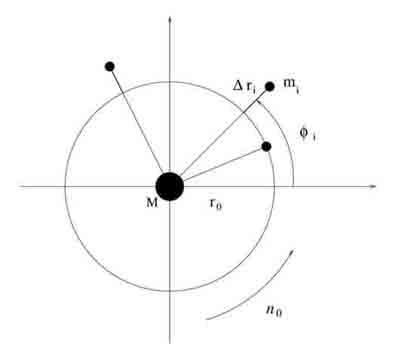
Notations pour la dynamique des satellites co-orbitaux (cf. texte).
On peut montrer que la dynamique de chaque satellite est régie par le système d'équations différentielles suivant :
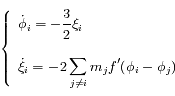
avec
 ,
, ![f'(\phi)= \sin \phi \left[ -1 + {1 \over 8|\sin \phi/2|^3} \right]](../pages_syst-lin/equations_syst-lin/equation23.png) ,
, 
Question 1)
Ecrire les deux équations algébriques donnant les points fixes du système.
Question 2)
Que signifie la première relation?
Question 3)
La seconde relation correspond en fait à  équations linéaires des masses. Ecrire ce système sous forme matricielle. On note
équations linéaires des masses. Ecrire ce système sous forme matricielle. On note  la matrice obtenue.
la matrice obtenue.
Question 4)
Que peut-on dire de la matrice  ?
?
Question 5)
Trouver les points d'équilibre dans le cas  .
.
Question 7)
On suppose que  est pair. Déterminer le rang de la matrice
est pair. Déterminer le rang de la matrice  , et en déduire qu'en général il n'existe pas de famille de vecteurs qui réalise un équilibre.
, et en déduire qu'en général il n'existe pas de famille de vecteurs qui réalise un équilibre.
Question 8)
Dans le cas où  est pair, quelle propriété doit vérifier la matrice
est pair, quelle propriété doit vérifier la matrice  pour pouvoir obtenir des solutions non-triviales
pour pouvoir obtenir des solutions non-triviales  ?
?
Question 9)
Vérifier les deux questions précédentes avec le cas  .
.
En savoir plus: Configurations d'équilibre de satellites co-orbitaux
 En savoir plus
En savoir plus
Les équations du mouvement sont donc:
avec
 ,
, ![f'(\phi)= \sin \phi \left[ -1 + {1 \over 8|\sin \phi/2|^3} \right]](../pages_syst-lin/equations_syst-lin/equation111.png) ,
, 
Pour établir ces équations, on a fait les hypothèses suivantes:
- chaque satellite a une masse négligeable devant celle du corps central : quelque soit
 ,
,  , où
, où  est la masse du
est la masse du  satellite
satellite
- l'excentricité des satellites est supposée nulle
- les satellites ne s'approchent pas trop de leurs rayons de Hill mutuels, définis par
![r_H = r_0 \cdot \left[\left(m_i + m_j\right)/3M\right]^{1/3}](../pages_syst-lin/equations_syst-lin/equation117.png) . Ainsi on évite tout mouvement chaotique, et les satellites restent co-orbitaux. On ne considère pas en particulier les points stationnaires alignés avec le satellite et la planète (comme les points de Lagrange
. Ainsi on évite tout mouvement chaotique, et les satellites restent co-orbitaux. On ne considère pas en particulier les points stationnaires alignés avec le satellite et la planète (comme les points de Lagrange  et
et  dans le cas N=2).
dans le cas N=2).
- pour simplifier et sans perte de généralité on a choisi
 ,
,  et
et 
La première équation n'est rien d'autre que la vitesse keplerienne différentielle de chaque satellite par rapport à l'orbite de référence de rayon  . La seconde équation contient, sous forme dérivée, tous les termes résultant des interactions gravitationnelles mutuelles entre les satellites.
. La seconde équation contient, sous forme dérivée, tous les termes résultant des interactions gravitationnelles mutuelles entre les satellites.
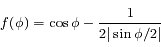
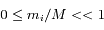
La fonction  est la somme des potentiels direct et indirect exercé par un satellite donné sur les autres co-orbitaux. C'est une fonction paire, et son graphe est tracé ci-dessous avec ses dérivées première et seconde
est la somme des potentiels direct et indirect exercé par un satellite donné sur les autres co-orbitaux. C'est une fonction paire, et son graphe est tracé ci-dessous avec ses dérivées première et seconde  et
et  .
.
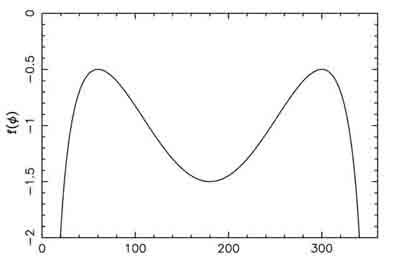
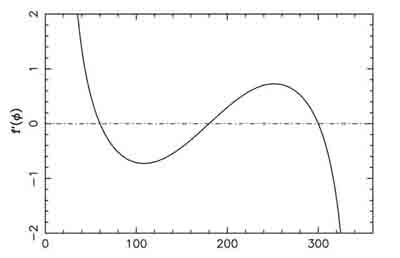
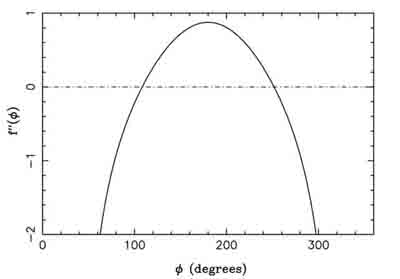
La fonction

, décrivant le potentiel créé par un satellite sur une particule co-orbitale, avec ses dérivées première et seconde

et

.
Puisque  est impaire, il est facile de montrer d'après les équations du mouvement que
est impaire, il est facile de montrer d'après les équations du mouvement que 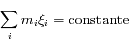 . Le rayon de référence
. Le rayon de référence  étant arbitraire, il peut être choisi de telle manière que
étant arbitraire, il peut être choisi de telle manière que , sans perte de généralité. Ainsi le système possède les intégrales premières suivantes :
, sans perte de généralité. Ainsi le système possède les intégrales premières suivantes :
qui résultent de la conservation du moment cinétique total. Cette conservation résulte elle-même de l'invariance par rotation du problème. Il existe une autre intégrale première :
![J= \sum_{i} m_i \left[ - {3 \over 4} \xi_i^2 + \sum_{j \neq i} m_j f(\phi_i - \phi_j) \right]](../pages_syst-lin/equations_syst-lin/equation135.png)
Elle exprime la conservation de l'énergie dans le repère tournant, et est appelée constante de Jacobi.
Exposants de Lyapunov
Ex: exposants de Lyapunov
Auteur: Marc Fouchard
exposants de Lyapunov
Difficulté : ☆☆☆
Temps : 1h30
Question 3)
Montrer que  .
.
Question 5)
En déduire qu'il existe au plus  exposants de Lyapunov distincts pour une trajectoire donnée.
exposants de Lyapunov distincts pour une trajectoire donnée.
Procéder par l'absurde en supposant  exposants de Lyapunov distincts.
exposants de Lyapunov distincts.
Applications linéaires et matrices
Auteurs: Alain Vienne, Marc Fouchard
Système de Laplace-Lagrange
Alain Vienne
Les mouvements de Jupiter et de Saturne sont très proches d'un mouvement képlérien. En effet, chacune de ces planètes est principalement attirée par le Soleil mais très peu par l'autre planète (la masse du Soleil est 1047 fois celle de Jupiter et 3498 fois celle de Saturne; ces 2 planètes étant les plus massives du système solaire). Leurs éléments d'orbite, notamment le demi-grand axe, l'excentricité ( ) et la direction du péricentre (
) et la direction du péricentre ( ), sont quasi constants. Plus précisément, soit ils varient peu (oscillations rapides de faible amplitude), soit ils varient lentement ("variations séculaires"). On dit que l'influence de Jupiter sur le mouvement de Saturne est une perturbation (et vice versa) du mouvement képlérien. L'objet de la mécanique céleste dans le cas de systèmes perturbés, est de modéliser ces variations.
), sont quasi constants. Plus précisément, soit ils varient peu (oscillations rapides de faible amplitude), soit ils varient lentement ("variations séculaires"). On dit que l'influence de Jupiter sur le mouvement de Saturne est une perturbation (et vice versa) du mouvement képlérien. L'objet de la mécanique céleste dans le cas de systèmes perturbés, est de modéliser ces variations.
Laplace (1749-1827) avait déjà montré que les demi-grands axes des planètes n'avaient pas de variations séculaires (plus précisément: à un certain degré d'approximation, les demi-grands axes des planètes n'ont que des petites variations périodiques). Ce qui était, à l'époque, un argument fort en faveur de la stabilité du système solaire.
Il fallait quand même s'assurer que les excentricités n'atteignent pas de valeurs trop grandes. En effet, de grandes excentricités conduisent vite à des collisions! L'objet de cette application est de voir que les variations d'excentricités sont bornées.
On simplifie notablement le calcul et la compréhension en utilisant la variable complexe suivante:

Par exemple, on verra dans l'exercice suivant que l'"execntricité complexe"  asssociée à Jupiter a le mouvement suivant:
asssociée à Jupiter a le mouvement suivant:
"Excentricité complexe" de Jupiter (

) qui montre que l'exentricité de Jupiter est bornée.
Ex: Système de Laplace-Lagrange
Auteur: Alain Vienne
Exercice
Difficulté : ☆
Temps : 1h30
Question 1)
La partie linéaire des équations séculaires relatives à  (Jupiter) et à
(Jupiter) et à  (Saturne) peut s'écrire:
(Saturne) peut s'écrire:


avec 
Montrer que  est diagonalisable et donner ses valeurs propres (appelées ici, "fréquences propres").
est diagonalisable et donner ses valeurs propres (appelées ici, "fréquences propres").
Remarque: on notera les valeurs propres  et
et  . Ces indices 5 et 6 font référence respectivement à la cinquième et à la sixième ligne de la matrice obtenue par Le Verrier lorsque celui-ci considérait les 8 planètes.
. Ces indices 5 et 6 font référence respectivement à la cinquième et à la sixième ligne de la matrice obtenue par Le Verrier lorsque celui-ci considérait les 8 planètes.
Question 2)
Intégrer le système différentiel en recherchant pour  et
et  une solution sous la forme de termes périodiques. On montrera que les valeurs propres de la matrice
une solution sous la forme de termes périodiques. On montrera que les valeurs propres de la matrice  sont les fréquences de ces termes périodiques.
sont les fréquences de ces termes périodiques.
Utiliser le fait que le système est diagonalisable pour définir un nouveau jeu de variables (qui seront les "éléments propres"). On utilisera formellement la matrice des vecteurs propres mais il est inutile de la calculer explicitement.
Question 3)
Donner les périodes de ces termes périodiques en années.
Question 4)
Sachant qu'à  , on a les valeurs:
, on a les valeurs:
 et
et 
 et
et 
calculer les constantes d'intégration de la solution, puis les amplitudes des termes à très longues périodes des solutions de  et
et  (on ne demande pas les phases)
(on ne demande pas les phases)
Question 5)
En déduire les valeurs extrêmes que peuvent atteindre les excentricités de Jupiter et de Saturne.
 Remarque
Remarque
Le fait que le système de Laplace-Lagrange conduit à des valeurs bornées de l'excentricité est illustré par la figure suivante. C'est la variable  qui est représentée.
qui est représentée.
Solution de la variable en excentricité de Jupiter (

) issue d'un système séculaire complet (non linéarisé et avec les 8 planètes).
Cette solution diffère de la notre car elle est issue d'un système séculaire complet, c'est à dire non linéarisé et avec les 8 planètes.
Pendule et matrice de Floquet
Auteur: Alain Vienne
Beaucoup de modèles dynamiques, après maintes transformations (hypothèses simplificatrices, moyennisations, ...), ressemblent au modèle du pendule (masse à une distance constante d'un point fixe sous l'effet de la pesanteur). Ici nous allons nous intéresser à un type d'équation du pendule correspondant à l'équation de Mathieu:
Si  est nul, c'est l'équation d'un pendule simple pour de petites oscillations. Dans ce cas,
est nul, c'est l'équation d'un pendule simple pour de petites oscillations. Dans ce cas,  est inversement proportionnel à la longueur du pendule. On rappelle que la période
est inversement proportionnel à la longueur du pendule. On rappelle que la période  est alors
est alors  .
.
Ici  est un petit paramètre. On dit que le modèle du pendule simple est perturbé. L'équation de Mathieu est un cas particulier de l'équation
est un petit paramètre. On dit que le modèle du pendule simple est perturbé. L'équation de Mathieu est un cas particulier de l'équation

où  est une fonction périodique de période
est une fonction périodique de période  qui est utilisée en Mécanique Céleste pour l'étude du mouvement de la Lune.
qui est utilisée en Mécanique Céleste pour l'étude du mouvement de la Lune.
De manière plus ludique, ces équations peuvent modéliser le mouvement d'une balançoire dont le passager se lève et s'assied (périodiquement) afin de s'élancer. Le fait de se lever et de s'assoir régulièrement revient à déplacer le centre de gravité du passager et donc, revient à faire varier périodiquement la longueur du pendule (ici la balançoire).
L'exercice qui suit ne résoud pas l'équation différentielle. Il cherche simplement à savoir dans quelles conditions la solution est bornée ou non (problème de stabilité). Il est insipré du théorème de Gustave Floquet (1847-1920). C'est un exercice de la théorie des équations différentielles mais il utilise beaucoup l'algèbre linéaire d'où sa présence dans cette partie.
Ex: Pendule et matrice de Floquet
Cet exercice est un classique de la théorie des équations différentielle. On le trouve donc dans la partie "Equations différentielles linéaires". Cependant il utilise beaucoup l'algèbre linéaire d'où sa présence dans cette partie.
Auteur: Alain Vienne
Exercice
Difficulté : ☆☆
Temps : 2h30
Voir l'énoncé
Lever et coucher du Soleil
Marc Fouchard
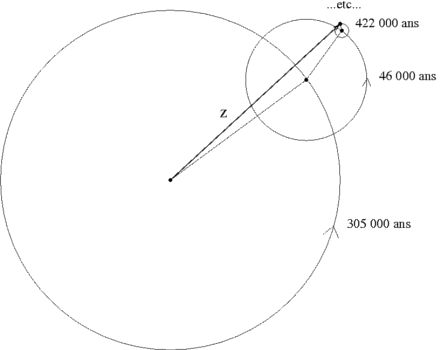
L'animation ci-dessous illustre le mouvement diurne du Soleil au dessus de l'horizon en un point de latitude  . Le point
. Le point  correspond à l'observateur. Il observe le mouvement du Soleil au cours d'une journée. Ce mouvement correspond uniquement à un changement de direction dans laquelle le Soleil est observé. Ainsi on peut représenter ce mouvement par un point se déplaçant sur une sphère (sphère céleste) centrée sur
correspond à l'observateur. Il observe le mouvement du Soleil au cours d'une journée. Ce mouvement correspond uniquement à un changement de direction dans laquelle le Soleil est observé. Ainsi on peut représenter ce mouvement par un point se déplaçant sur une sphère (sphère céleste) centrée sur  est de rayon qu'on prendra arbitrairement égale à 1.
est de rayon qu'on prendra arbitrairement égale à 1.
Sur cette sphère, on peut représenter toutes les directions parallèles à l'horizon, ce qui défini l'horizon céleste. Les astres dont la direction se trouve en dessous de l'horizon céleste ne sont pas visibles depuis  .
Sur l'horizon céleste on peut représenter les directions du Sud
.
Sur l'horizon céleste on peut représenter les directions du Sud  , de l'Ouest
, de l'Ouest  , du Nord
, du Nord  et de l'Est
et de l'Est  .
De même, on peut représenter la direction perpendiculaire à l'horizon: le Zénith (
.
De même, on peut représenter la direction perpendiculaire à l'horizon: le Zénith ( ) et la direction parallèle à l'axe de rotation de la Terre: le pôle céleste Nord (
) et la direction parallèle à l'axe de rotation de la Terre: le pôle céleste Nord ( ). Le plan qui coupe la sphère céleste perpendiculaire à la direction
). Le plan qui coupe la sphère céleste perpendiculaire à la direction  et passant par
et passant par  , s'appelle l'équateur céleste. Sur l'équateur céleste on note
, s'appelle l'équateur céleste. Sur l'équateur céleste on note  la direction du Sud. On note
la direction du Sud. On note  le Nadir, qui correspond à la direction opposée au Zénith, et on note
le Nadir, qui correspond à la direction opposée au Zénith, et on note  le pôle céleste Sud qui correspond à la direction opposée au pôle céleste nord. On remarquera que les points
le pôle céleste Sud qui correspond à la direction opposée au pôle céleste nord. On remarquera que les points  et
et  sont coplanaires avec
sont coplanaires avec  .
.
Ainsi, au cours d'une journée la Terre tourne autour d'un axe parallèle à  . Pour l'observateur, ceci ce traduit par un déplacement des astres observés sur des cercles parallèles à l'équateur céleste.
. Pour l'observateur, ceci ce traduit par un déplacement des astres observés sur des cercles parallèles à l'équateur céleste.
Soit  le point de la sphère céleste indiquant la direction dans laquelle est observé le Soleil depuis
le point de la sphère céleste indiquant la direction dans laquelle est observé le Soleil depuis  . On appelle
. On appelle  l'intersection de l'arc de grand cercle
l'intersection de l'arc de grand cercle  avec l'équateur céleste et
avec l'équateur céleste et  l'intersection de l'arc de grand cercle
l'intersection de l'arc de grand cercle  avec l'horizon céleste.
avec l'horizon céleste.
On note  l'angle
l'angle  ,
,  l'angle
l'angle  ,
,  l'angle
l'angle  et
et  l'angle
l'angle  .
.  sont appelées les coordonnées locales, alors que
sont appelées les coordonnées locales, alors que  sont les coordonnées horaires. Au court du mouvement diurne d'une étoile seule
sont les coordonnées horaires. Au court du mouvement diurne d'une étoile seule  est constant. Pour le Soleil
est constant. Pour le Soleil  varie au cours de l'année, mais on peut le considérer constant sur une journée. L'animation permet de modifier
varie au cours de l'année, mais on peut le considérer constant sur une journée. L'animation permet de modifier  afin de voir les variations dans le mouvement diurne en fonction de
afin de voir les variations dans le mouvement diurne en fonction de  .
.
Le but de cette exercice est d'établir des relations entre les coordonnées horaires et locales par des rotations puis d'utiliser ces relations pour calculer les heures de lever et de coucher du Soleil aux solstices et aux équinoxes.

Ex: Lever et coucher du Soleil
Auteur: Marc Fouchard
Exercice
Difficulté : ☆☆
Temps : 1h
Question 8)
En déduire les valeurs de l'angle horaire  au moment du lever et du coucher du Soleil en fonction de
au moment du lever et du coucher du Soleil en fonction de  et
et  .
.
Etoiles doubles
Marc Fouchard
Les étoiles doubles correspondent à des couples d'étoiles reliées gravitationnellement l'une à l'autre. Ainsi, les deux étoiles effectuent un mouvement elliptique autour du centre de gravité du couple. La détermination des paramètres de cette ellipse, et en particulier de son demi-grand axe, est particulièrement importante parce qu'elle permet d'obtenir la masse des étoiles.
L'objet de ce petit exercice est juste d'établir le système permettant de déterminer les paramètres de l'équation algébrique d'une conique.
Ex: Etoiles doubles
Auteur: Marc Fouchard
Etoiles doubles
Difficulté : ☆
Temps : 20 mn
Question 1)
Quelle est l'équation générale d'une conique dans le plan.
Question 2)
Pour une ellipse, on a la contrainte supplémentaire que  (entre autre). En déduire une équation de l'ellipse contenant cinq paramètres.
(entre autre). En déduire une équation de l'ellipse contenant cinq paramètres.
Question 3)
On a donc cinq paramètres indépendants à déterminer. Combien, au moins, nous faut-il d'observation pour pouvoir déterminer les paramètres ?
Question 4)
Soit  ,
,  , ces 5 observations. Ecrire sous forme matricielle le système à résoudre.
, ces 5 observations. Ecrire sous forme matricielle le système à résoudre.
Question 5)
Donner une astuce pour se ramener à la résolution d'un système à trois inconnues que l'on déterminera.
Il faut pour cela choisir un repère orthormé dans lequel les coordonnées de  et
et  sont les plus simples possibles.
sont les plus simples possibles.
Théorie Spectrale
Auteurs: Arnaud Beck, Jérôme Thiébaut
Onde de Langmuir
Auteur: Arnaud Beck
Un plasma est un gaz dont les constituants, au lieu d'être neutres, sont électriquement chargés. Cela en fait un milieu bien plus complexe qu'un fluide traditionnel.
Dans un gaz normal, toutes les perturbations se propagent de la même manière et à la même vitesse. Ainsi, si quelqu'un fait vibrer un gaz à un point A, cette vibration va se propager jusqu'au point B à la vitesse du son, indépendamment de la fréquence de la vibration. Ce sont les ondes sonores.
Dans un plasma, les interactions entre particules chargées permettent à un grand nombre d'ondes différentes d'exister. Chacune de ces ondes propage des perturbations qui peuvent être de natures différentes (charge, pression, champ électrique, champ magnétique ...) et ont des vitesses différentes qui dépendent, entre autres, de la fréquence de la perturbation.
Dans cet exercice, on propose de retrouver la relation de dispersion d'une de ces ondes de plasma appelée "Onde de Langmuir". De telles ondes sont créées lorsqu'on écarte localement le plasma de la neutralité de charge. On cherche donc à savoir comment cet écart à la neutralité va se propager dans le plasma.
Ex: Onde de Langmuir
Auteur: Arnaud Beck
Relation de dispersion
Difficulté : ☆☆
Temps : 1h
Un plasma est constitué d'ions et d'électrons. Les ions étant largement plus lourds, nous allons les supposer immobiles dans le développement qui suit. Considérons qu'ils sont répartis uniformément dans l'espace avec une densité  .
.
L'onde de Langmuir étant la propagation d'une perturbation électrostatique (écart à la neutralité mais sans création de courant électrique à grande échelle), nous pouvons, pour simplifier le problème, supposer l'absence de champ magnétique.
A l'équilibre, les électrons sont eux aussi immobiles et uniformément répartis avec une densité  . Mais, que se passe t-il si on perturbe cet équilibre en posant que
. Mais, que se passe t-il si on perturbe cet équilibre en posant que  , où
, où  est un petit terme perturbatif qui dépend de la position
est un petit terme perturbatif qui dépend de la position  et du temps
et du temps  ?
?
Dans ce cas, un champ électrique  se crée et met les électrons en mouvement à une vitesse
se crée et met les électrons en mouvement à une vitesse  .
.
Les équations qui gouvernent ensuite l'évolution de ces trois grandeurs (perturbation de densité, champ électrique et vitesse des électrons) sont l'équation de continuité, l'équation de conservation du moment dynamique et l'équation de Poisson:

où  est la température moyenne des électrons,
est la température moyenne des électrons,  leur masse,
leur masse,  leur charge, et
leur charge, et  la permittivité du vide.
la permittivité du vide.
Les équations ont été ici écrites à une dimension, dans la direction x. On suppose que les perturbations vont se propager dans cette direction sous la forme d'onde plane et donc que l'on peut écrire:



où  est la pulsation de l'onde et
est la pulsation de l'onde et  l'amplitude de son vecteur d'onde selon
l'amplitude de son vecteur d'onde selon  .
.
Question 2)
Trouver la relation de dispersion de l'onde, c'est à dire une expression de  en fonction de
en fonction de  .
.
Question 3)
Si on prend le mouvement des ions en compte, le système d'équation change et on trouve une nouvelle relation de dispersion qui correspond cette fois à une onde acoustique ionique.
En utilisant la même méthode que précédemment, retrouver la fonction de dispersion d'une onde acoustique ionique à partir du système d'équations ci dessous. Les indices  et
et  indiquent l'espèce (électron ou ion).
indiquent l'espèce (électron ou ion).
où les  sont des constantes (rapports des chaleurs spécifiques de chaque espèce).
sont des constantes (rapports des chaleurs spécifiques de chaque espèce).
Filtrage de Wiener
Auteur: Jérôme Thiébaut
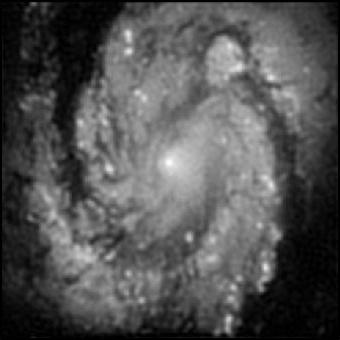
En astrophysique, les photos de galaxies sont prises par des caméras CCD fixées derrière un télescope. L'instrument d'observation, ici le télescope, laisse son empreinte sur l'image. A cela s'ajoute le bruit de mesure c'est à dire un signal autre que l'image elle même qui s'ajoute à celle-ci. Ce bruit est dû à la caméra.... On se propose dans cet exercice de montrer comment retrouver l'image la plus proche de l'image initiale, c'est à dire de déconvoluer et de filtrer l'image reçue afin de s'affranchir au maximum des effets de l'instrument d'observation et du bruit.
Ex: Filtrage de Wiener
Auteur: Jérôme Thiébaut
Filtrage de Wiener
Difficulté : ☆☆
Temps : 40mn
Question 3)
Dans l'espace de Fourier, les matrices de variance-covariance sont diagonales également et se réduisent aux spectres de puissances. Montrer que le filtre de Wiener  inverse les basses fréquences et coupe les plus grandes où le bruit domine.
inverse les basses fréquences et coupe les plus grandes où le bruit domine.
Image déconvoluée filtrée
Groupe quotient
Phénomènes mutuels
Auteur: Stéphane Erard
L'arithmétique intervient en Astronomie lorsqu'il est question de phénomènes périodiques. Historiquement, la prévision des éclipses et des fêtes religieuses a fait appel à de tels calculs. Dans la période moderne, c'est la mécanique quantique (à travers l'équation de Schrödinger) qui introduit des solutions à base de nombres entiers.
Ex: Phénomènes mutuels
Auteur: Stéphane Erard
Phénomènes mutuels
Difficulté : ☆☆
Temps : 45 min
Le corps céleste A a une période synodique (par rapport à la Terre) de 105 jours et passe à l'opposition à la date  . Six jours plus tard on observe à l'opposition le corps B dont la période synodique est de 81 jours.
. Six jours plus tard on observe à l'opposition le corps B dont la période synodique est de 81 jours.
On veut déterminer la date  de la prochaine opposition simultanée des deux corps.
de la prochaine opposition simultanée des deux corps.
Question 1)
Trouver une condition permettant de déterminer cette date.
Question 2)
Trouver une solution particulière de cette équation.
Question 3)
Déterminer toutes les solutions de l'équation trouvée plus haut.
Question 4)
Quelle est la date de la prochaine opposition commune ?
Question 5)
Application à Mars et Jupiter : une opposition de Mars a eu lieu le 24/12/2007, l'opposition suivante de Jupiter le 4/7/2008. Les périodes synodiques respectives sont de 780 et 399 jours. Quand se produira la prochaine opposition simultanée des deux planètes ?
L'intervalle entre les deux oppositions est de 193 jours (on calcule ce type d'intervalle en convertissant les dates en jours juliens, ce que font tous les tableurs courants).
Atome de Bohr
Auteur: Stéphane Erard
Les premières mesures spectroscopiques ont révélé à la fin du XIXe siècle un comportement inattendu des sources lumineuses : elles présentent fréquemment des raies intenses, soit en absorption soit en émission. Pour une source donnée, l'émission ou l'absorption ne se produisent qu'à certaines longueurs d'onde. La formule expérimentale de Balmer-Rydberg (1885-88) rend compte de la position de ces raies pour l'atome d'hydrogène, mais ne correspond à aucun phénomène connu.
Divers modèles de structure atomique ont été proposés dans les années suivantes pour intégrer les résultats expérimentaux de l'époque. Le modèle de Bohr pour l'atome d'hydrogène (1913) a fourni la première explication des résultats spectroscopiques. Il implique un comportement non-classique des systèmes microscopiques, qui sautent sans transition entre états d'énergie discrets.
Ex: Atome de Bohr
Auteur: Stéphane Erard
Modèle de Rutherford
Difficulté : ☆
Temps : 30 min
Un des premiers modèles atomiques modernes est celui de Rutherford (1911), s'appuyant sur des expériences de diffusion de particules alpha. Ce modèle suppose que l'atome est formé d'un noyau de très petites dimensions chargé positivement, autour duquel gravitent des électrons négatifs beaucoup moins massifs sur des orbites circulaires. En raison d'une analogie évidente, on l'appelle modèle planétaire.
Question 1)
On considère un atome d'hydrogène où un électron unique orbite autour d'un noyau de charge unité. L'électron est soumis à une force électrostatique d'intensité 
où e est la charge de l'électron et du noyau (opposées), r leur distance et  une constante physique (permittivité du vide).
une constante physique (permittivité du vide).
Ecrire la distance électron-noyau dans ce modèle.
On écrit le principe fondamental de la dynamique  et on projette sur le rayon vecteur.
et on projette sur le rayon vecteur.
Question 2)
Calculer l'énergie totale (cinétique et potentielle).
Auteur: Stéphane Erard
Atome de Bohr
Difficulté : ☆
Temps : 45 min
Une difficulté avec le modèle de Rutherford est qu'il ne rend pas compte des expériences de spectroscopie de l'époque et de l'existence de raies spectrales. Par ailleurs, l'électrodynamique classique prévoit que les électrons devraient rayonner et perdre de l'énergie, ce qui les ferait tomber sur le noyau très rapidement.
Niels Borh travaillait à ce problème quand il prit connaissance de la formule de Balmer qui donne la position observée des raies spectrales de l'hydrogène dans le visible :
où  est la fréquence associée, n est un nombre entier > 2, R une constante et c la vitesse de la lumière.
est la fréquence associée, n est un nombre entier > 2, R une constante et c la vitesse de la lumière.
Par ailleurs il connaissait l'hypothèse d'Einstein formulée pour l'étude de l'effet photo-électrique : la lumière peut se décomposer en "quanta" (les photons) dont l'énergie est liée à la fréquence  du rayonnement :
du rayonnement :  .
.
En rapprochant ces faits, Bohr formula l'hypothèse que l'atome ne peut prendre que certains états d'énergie donnés dans son modèle atomique (1913).
Question 1)
Calculer les longueurs d'onde des raies visibles et dessiner le spectre de l'hydrogène à l'aide de la formule ci-dessus. On prendra les raies de Balmer n = 3 à 6 qui sont dans le domaine visible, et 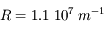 (constante de Rydberg).
(constante de Rydberg).
Question 2)
Ecrire les variations d'énergie de l'atome d'hydrogène liées à l'émission d'une raie de la série de Balmer.
Question 3)
En déduire les valeurs possibles du rayon de l'électron et du moment cinétique  .
.
Question 4)
Comment interpréter ce résultat ?
remarque
Les autres séries de raies de l'hydrogène correspondent à des transitions vers les couches n ≠ 2. On peut représenter les niveaux énergétiques de l'hydrogène de la façon suivante :
Diagramme énergétique de l'hydrogène
La première raie de Balmer  est particulièrement importante en Astronomie car elle permet de détecter l'hydrogène atomique dans le milieu interstellaire.
est particulièrement importante en Astronomie car elle permet de détecter l'hydrogène atomique dans le milieu interstellaire.
Cycles astronomiques et fractions continues
Auteur: Alexandre Pousse
Introduction
Les fractions continues ont une très longue histoire car liées à celle des nombres. En effet, il existe un lien important entre celles-ci et l'algorithme d'Euclide.
Plus particulièrement, elles apparaissent dans l'approximation de nombre comme π ou du nombre d'or.
Délaissées pendant un certain temps, elles sont redécouvertes en Europe en 1655 par le mathématicien anglais John Wallis, puis étudiées par la suite par Leonhard Euler qui va apporter de nombreux théorèmes.
L'interêt de l'étude des fractions continues est souvent pour l'approximation d'équations diophantiennes. Ce sont des équations algébriques pour lesquelles on cherche des solutions en entiers. Un exemple particulier qui est utile en astronomie car permettant de mettre en évidence des phénomènes de résonnances ou de prévoir le retour d'un phénomène périodique, c'est de fixer  deux nombres représentant des périodes, et de trouver
deux nombres représentant des périodes, et de trouver  , deux entiers tels que
, deux entiers tels que  . La notion d'approximation introduite par les fractions continues est utilisée lorsque
. La notion d'approximation introduite par les fractions continues est utilisée lorsque  sont irrationnelles ou rationnelles comportant de nombreuses décimales (ce qui est fréquent de manière générale en Physique), on va alors chercher à trouver la meilleure combinaison linéaire approximant
sont irrationnelles ou rationnelles comportant de nombreuses décimales (ce qui est fréquent de manière générale en Physique), on va alors chercher à trouver la meilleure combinaison linéaire approximant  .
Autre application des fractions conitnues: en arithmétique, elles vont permettre l'étude et la caractérisation de nombres transcendants (par exemple, par l'étude de leur périodicité).
.
Autre application des fractions conitnues: en arithmétique, elles vont permettre l'étude et la caractérisation de nombres transcendants (par exemple, par l'étude de leur périodicité).
Définitions et propriétés
Une fraction continue est un objet s'écrivant sous la forme  où les
où les  et les
et les  sont des nombres entiers naturels ou relatifs.
La fraction obtenue peut être composée d'un nombre fini ou infini de termes.
sont des nombres entiers naturels ou relatifs.
La fraction obtenue peut être composée d'un nombre fini ou infini de termes.
Mais ce que nous utiliserons par la suite et qui ont été étudiées plus particulièrement, ce sont les fractions continues simples, c'est-à-dire de la forme  avec
avec  et
et  (fini ou non). Une notation plus compacte et qui sera utilisée ici est d'écrire
(fini ou non). Une notation plus compacte et qui sera utilisée ici est d'écrire ![[a_0;a_1;a_2;...;a_n;...]](../pages_quotient/equations_quotient/equation57.png) .
.
Afin de caractériser une fraction continue, on utilise la notion de réduite. Par exemple, pour  , on appellera réduite de la fraction continue définie par la suite
, on appellera réduite de la fraction continue définie par la suite  , la fraction
, la fraction ![\frac{p_n}{q_n}=[a_0;a_1;a_2;a_3;...;a_n]](../pages_quotient/equations_quotient/equation60.png) . Pour le nombre d'or
. Pour le nombre d'or  , les trois premières réduites sont
, les trois premières réduites sont ![\frac{p_0}{q_0}= [1]](../pages_quotient/equations_quotient/equation62.png) ,
, ![\frac{p_1}{q_1}=[1;1]](../pages_quotient/equations_quotient/equation63.png) ,
, ![\frac{p_2}{q_2}=[1;1;1]](../pages_quotient/equations_quotient/equation64.png) .
Ainsi, nous obtenons deux suites d'entiers
.
Ainsi, nous obtenons deux suites d'entiers  et
et  avec en particulier, la propriété suivante:
si
avec en particulier, la propriété suivante:
si  ,
,  et
et  , et si
, et si  ,
,  et
et  , alors
, alors ![\forall n \geq 0~~ \frac{p_n}{q_n} = [a_0;a_1;a_2;a_3;...a_n]](../pages_quotient/equations_quotient/equation73.png) .
.
Approximation des nombres
Introduisons maintenant la fraction continue dans le cadre de l'approximation des nombres. Soit α un réel et  une suite de réels telle que:
une suite de réels telle que:
 ,
,
si  alors
alors  ,
,
sinon  .
.
Ainsi, on obtient le développement suivant ![\alpha = a_0 + \frac{1}{\alpha_1}= a_0 + \frac{1}{a_1 + \frac{1}{\alpha_2}}} = a_0 + \frac{1}{a_1 + \frac{1}{a_2+ \frac{1}{\alpha_3}}}}=...=[a_0;a_1;a_2;...;a_n+ \frac{1}{\alpha_{n+1}}]=...](../pages_quotient/equations_quotient/equation79.png)
Les exercices qui suivent vont ainsi permettre de mettre en évidence la propriété théorique sur les réduites ainsi que des applications astronomique par la recherche de meilleure solution approximation de l'équation diophantienne via les fractions continues en caractérisant le mouvement de Saturne et de la Terre, le phénomène d'éclipse et en définissant une meilleure approximation de l'année tropique.
Ex: Cycles astronomiques et fractions continues
Auteur: Alexandre Pousse
Propriété des réduites
Difficulté : ☆
Temps : 10 min
Soient  et
et  , deux suites d'entiers. Rappelons la propriété sur les réduites donnée dans le cours:
, deux suites d'entiers. Rappelons la propriété sur les réduites donnée dans le cours:
si  ,
,  et
et  ,
,
et si  ,
,  et
et  ,
,
alors ![\forall n \geq 0~~ \frac{p_n}{q_n} = [a_0;a_1;a_2;a_3;...a_n]](../pages_quotient/equations_quotient/equation93.png) .
.
Question 1)
Démontrer la propriété des réduites.
Auteur: Alexandre Pousse
Une meilleure approximation de l'année tropique
Difficulté : ☆
Temps : 30 min
Une année tropique correspond au temps s'écoulant entre deux équinoxes de printemps, c'est-à-dire 365.24219052 jours (année tropique moyenne à J2000). C'est donc l'année permettant "le retour des saisons" au mêmes dates et donc compensant le phénomène de précession des équinoxes.
En effet, avant la réforme du calendrier par Grégoire XIII au XVIe siècle, le calendrier était le calendrier Julien, établi par l'astronome Sosigène d'Alexandrie et comportant 365.25 jours (année bissextile tous les quatre ans). Cela impliquait un décalage d'un jour tous les 128 ans, d'où modification de la date de retour des saisons.
L'idée de cet exercice est de comprendre le calendrier utilisé aujourd'hui, puis de trouver par l'intermédiaire d'une fraction continue une valeur plus stable de l'année.
Question 1)
L'année grégorienne correspond à 366 jours les années multiples de quatre et non multiples de cent sauf les année multiples de quatre cents. Sinon, l'année vaut 365 jours.
Établir la valeur et la fraction représentant la partie décimale de l'année grégorienne.
Question 2)
On définira la notion de stabilité comme l'écart la durée de l'année estimée et la durée de l'année tropique moyenne. Le réel obtenu permet de déduire le décalage du retour des équinoxes.
Évaluer la stabilité du calendrier grégorien. Au bout de combien de temps le calendrier se décale d'un jour?
Question 3)
En utilisant la méthode d'approximation des nombres à l'aide d'une fraction continue, trouver une nouvelle définition de l'année beaucoup plus stable que l'année grégorienne. Proposer une méthode d'application pour remplacer le calendrier actuel.
Auteur: Alexandre Pousse
L'automate de Huygens
Difficulté : ☆
Temps : 30 min
Christian Huygens, mathématicien et astronome du XVIIe siècle, souhaitait réaliser un automate planétaire permettant de modéliser l'évolution du système solaire au cours du temps (en approximation circulaire). À cet époque, le système solaire ne comprend que 6 planètes (Mercure, Venus, Terre, Mars, Jupiter et Saturne). Rappelons qu'un automate est un système composé d'une manivelle reliée à différents rouages, chacun associé à la période de révolution d'une planète par leur nombre de dents.
Lors de la conception de cet objet, Huygens se retrouve confronté à une difficulté: le rapport de l'année terrestre et de celle de Saturne. Combien faut-il de dents sur les deux engrenages pour décrire convenablement le mouvement de la Terre et de Saturne au cours de leur révolution?
Question 1)
Dans l'approximation d'orbites circulaires, poser l'équation diophantienne du problème de l'automate.
Question 2)
Sur son orbite, la Terre parcourt un angle  en un an. De même en un an, Saturne réalise
en un an. De même en un an, Saturne réalise  (Ce sont les valeurs de l'époque).
(Ce sont les valeurs de l'époque).
Établir la fraction rationnelle donnée par le rapport  . Est-il raisonnable de réaliser deux engrenages associés à cette fraction?
. Est-il raisonnable de réaliser deux engrenages associés à cette fraction?
Question 3)
Maintenant, afin de supprimer ce problème technique, introduire la notion de fraction continue pour résoudre le problème par approximation diophantienne.
Question 4)
Huygens définit la notion de stabilité comme le décalage entre l'angle parcouru par Saturne sur son automate et dans la réalité après que la Terre ait réalisé 100 révolutions.
À l'aide d'un développement en fraction continue, proposer un engrenage satisfaisant d'un point de vue technique (au delà d'un millier de dents, la réalisation est difficile) et stable au sens de Huygens.
Auteur: Alexandre Pousse
Le cycle de Saros
Difficulté : ☆
Temps : 60 min
Un cycle de Saros correspond à 223 lunaisons. C'est une période associée au retour d'une éclipse de Soleil (resp. de Lune) après une éclipse totale. Ainsi, si une éclipse a lieu à un instant t alors il est possible de prédire qu'au temps t+223 lunaisons il s'en reproduira une autre.
L'idée de cet exercice est de comprendre et de retrouver pourquoi nous avons ce nombre de 223 lunaisons pour le retour d'une éclipse.
Question 1)
Définir géométriquement la notion d'éclipse de Lune (resp. de Soleil) vu de la Terre (avec la notion de droite ou de plan par exemple).
Question 2)
Caractériser la notion d'éclipse en terme de position de la Lune sur son orbite ainsi que de son éclairement relatif à la Terre.
Question 3)
Introduisons deux notions pour la détermination de cycle de Saros.
Le mois draconitique, c'est le temps que met la Lune à partir du noeud ascendant pour y revenir. La durée du mois draconitique est de  .
.
Le mois synodique ou lunaison est le temps entre deux nouvelles Lunes successives. Sa durée est d'en moyenne  .
.
Dans l'approximation d'orbites circulaires, poser l'équation diophantienne du problème du retour d'éclipse.
Question 4)
Introduire la notion de fraction continue pour résoudre le problème par approximation diophantienne.
Question 5)
Rappelons que le diamètre de la Lune et du Soleil vu de la Terre est de 30' d'arc.
Établir l'erreur de coincidence maximal pour que l'on ait une éclipse (on considère qu'une éclipse partielle est encore une éclipse).
Question 6)
Développer la fraction continue jusqu'au terme adéquat (évaluation des réduites et contrôle de l'erreur de coïncidence).
Question 7)
Conclure sur la notion de cycle de Saros.
Question 8)
Vous vous rappelez peut-être de l'éclipse totale de Soleil du 11 août 1999 (éclipse totale de la Normandie à l'Alsace en France et partielle au voisinage de cette bande). Déterminer quand cette configuration va t-elle se reproduire? Va t-elle avoir lieu aux mêmes longitudes?
Réponses aux exercices
pages_poly/exo-factorisation-laplace.html
Exercice
'Factorisation du polynôme de la méthode de Laplace'
-
Question 1
-
Question 2
Aide :
Faire le changement de variables pour éliminer les fractions.
Aide :
Lors de la substitution  (ou équivalemment
(ou équivalemment  de la question précédente), repérer les groupes de termes qui s'annulent afin de mettre
de la question précédente), repérer les groupes de termes qui s'annulent afin de mettre  en facteur dans chacun de ces groupes
en facteur dans chacun de ces groupes
Solution :
On obtient:
![(z-1)\ \ [s^8 z^6 (z+1) - 2 \alpha \beta s^3 z^3 (z^2+z+1) - \alpha^2 (z-1) (z^2+z+1)^2]](../pages_poly/equations_poly/equation19.png)
Si on en a le courage et le temps, il ne reste plus qu'à développer l'expression et à remplacer  par
par  .
.
pages_poly/exo-poly-legendre-racines2.html
Exercice
'Les racines des polynômes de Legendre'
pages_syst-lin/exo-sat-coorb.html
Exercice
'Equilibres de satellites co-orbitaux'
-
Question 1
Solution :
Les points fixes du système sont donnés par :
 ,
,
et
pour tout  .
.
-
Question 2
Solution :
La première équation signifie qu'en configuration stationnaire les  satellites co-orbitaux ont le même rayon orbital. Dans le problème exact, cela est seulement vrai à l'ordre 0 en
satellites co-orbitaux ont le même rayon orbital. Dans le problème exact, cela est seulement vrai à l'ordre 0 en  . Les petites corrections d'ordre
. Les petites corrections d'ordre  sont ici négligées.
sont ici négligées.
-
Question 3
Solution :
La seconde équation fait intervenir les séparations angulaires entre les satellites et peut s'écrire sous forme matricielle. On définit  . La fonction
. La fonction  étant impaire, on obtient:
étant impaire, on obtient:
![\left [ \begin{array}{ccccc} 0 & f'_{12} & \cdots & \cdots & f'_{1N} \\ - f'_{12} & 0 & f'_{23} & \cdots & f'_{2N} \\ \vdots & & 0 & & \\ \vdots & & & \ddots & \\ - f'_{1N} & & & & 0 \end{array} \right] \cdot \left [ \begin{array}{ccccc} m_1 \\ m_2 \\ \vdots \\ \vdots \\ m_N \end{array} \right] \equiv M_N \cdot \left [ \begin{array}{ccccc} m_1 \\ m_2 \\ \vdots \\ \vdots \\ m_N \end{array} \right] = 0_{{\mathbb R}^N}](../pages_syst-lin/equations_syst-lin/equation35.png)
-
Question 4
Solution :
La matrice  définie ci-dessus est antisymétrique. Elle ne dépend que des longitudes
définie ci-dessus est antisymétrique. Elle ne dépend que des longitudes  , via les coefficients
, via les coefficients  .
.
-
Question 5
Solution :
Avec  , la condition d'équilibre s'écrit
, la condition d'équilibre s'écrit
 ,
,
c'est-à-dire
 et
et  ,
,  ou
ou  .
.
Les points d'équilibre sont respectivement les points de Lagrange  ,
,  et
et  .
.
-
Question 6
Solution :
Puisque  est antisymétrique, son rang est pair. C'est un résultat classique d'algèbre linéaire, non redémontré ici.
est antisymétrique, son rang est pair. C'est un résultat classique d'algèbre linéaire, non redémontré ici.
Par conséquent, pour des angles  donnés, l'existence de solutions non-triviales (positives ou négatives) du système linéaire va dépendre de la parité du nombre
donnés, l'existence de solutions non-triviales (positives ou négatives) du système linéaire va dépendre de la parité du nombre  de satellites.
de satellites.
Si N est impair,  avec
avec  impair. Ainsi, étant données des séparations angulaires arbitraires et non-nulles entre les satellites, il existe une famille à k paramètres de vecteurs
impair. Ainsi, étant données des séparations angulaires arbitraires et non-nulles entre les satellites, il existe une famille à k paramètres de vecteurs  pour laquelle la configuration est stationnaire: étant données par exemple
pour laquelle la configuration est stationnaire: étant données par exemple  ,
,  , ...,
, ...,  , le système linéaire admet une et une seule solution
, le système linéaire admet une et une seule solution  .
.
-
Question 7
Solution :
Si  est pair, le rang de
est pair, le rang de  est généralement
est généralement  : étant donnée une configuration angulaire arbitraire
: étant donnée une configuration angulaire arbitraire  , il n'existe pas en général de solutions non-triviales
, il n'existe pas en général de solutions non-triviales  pour lesquelles
pour lesquelles  est un équilibre.
est un équilibre.
-
Question 8
Solution :
On doit tout d'abord annuler le déterminant de la matrice,  , afin de trouver des solutions non-triviales.
, afin de trouver des solutions non-triviales.
-
Question 9
Aide :
Dans le cas  , seuls les points de Lagrange
, seuls les points de Lagrange  ,
,  et
et  sont des points d'équilibre. Deux satellites à par exemple
sont des points d'équilibre. Deux satellites à par exemple  l'un de l'autre sont stationnaires quelque soit le choix arbitraire des masses
l'un de l'autre sont stationnaires quelque soit le choix arbitraire des masses  et
et  .
.
pages_syst-lin/exo-expo-lyap.html
Exercice
'exposants de Lyapunov'
pages_appli-lin/exo-lap-lag.html
Exercice
pages_appli-lin/exo-lever-coucher.html
Exercice
-
Question 1
Solution :
Par définition on a  . Les points
. Les points  et
et  sont coplanaires, ainsi
sont coplanaires, ainsi  .
.
On a  .
.
-
Question 2
Solution :
Par définition  . Comme
. Comme  est orthogonal à
est orthogonal à  , on en déduit que
, on en déduit que  se trouve sur l'équateur céleste (par définition de l'équateur céleste). De même,
se trouve sur l'équateur céleste (par définition de l'équateur céleste). De même,  est perpendiculaire au plan
est perpendiculaire au plan  qui est confondu avec le plan
qui est confondu avec le plan  . Ainsi
. Ainsi  est orthogonal à
est orthogonal à  , donc le point
, donc le point  se trouve aussi sur l'équateur céleste. Finalement, les points
se trouve aussi sur l'équateur céleste. Finalement, les points  et
et  sont sur l'équateur céleste. On a donc:
sont sur l'équateur céleste. On a donc:  .
.
On a  .
.
-
Question 3
Solution :
Par définition on a  . Les points
. Les points  et
et  sont coplanaires, ainsi
sont coplanaires, ainsi  .
.
On a  .
.
-
Question 4
Solution :
Par définition  . Comme
. Comme  est orthogonal à
est orthogonal à  , on en déduit que
, on en déduit que  se trouve sur l'horizon céleste (par définition de
se trouve sur l'horizon céleste (par définition de  ). Ainsi, les points
). Ainsi, les points  et
et  sont sur l'horizon céleste. On a donc:
sont sur l'horizon céleste. On a donc:  .
.
On a  .
.
-
Question 5
Solution :
Les points  et
et  sont coplanaires. Ainsi
sont coplanaires. Ainsi  et
et  .
.
Avec  ,
on a
,
on a  .
.
-
Question 6
Solution :
 .
.
-
Question 7
Solution :
 .
.
 .
.
Ainsi on a  .
.
-
Question 8
Solution :
Au moment du coucher et du lever  . Ainsi les trois relations deviennent:
. Ainsi les trois relations deviennent:
Ainsi on a  .
.
Sous réserve de la non annulation des dénominateurs, on peut diviser la première relation par la troisième pour obtenir :  .
.
Ainsi on a  avec
avec  .
.
-
Question 9
Solution :
Pour  on a
on a  et la durée du jour est de 12h. On remarque que ce résultat est indépendant de
et la durée du jour est de 12h. On remarque que ce résultat est indépendant de  .
Pour
.
Pour  , on a
, on a  , donc la durée du jour est de
, donc la durée du jour est de  .
Pour
.
Pour  , on a
, on a  , donc la durée du jour est de
, donc la durée du jour est de  .
.
pages_appli-lin/exo-ed.html
Exercice
'Etoiles doubles'
-
Question 1
Solution :
L'équation d'une conique correspond à un polynôme en  et
et  de degré deux, c'est-à-dire :
de degré deux, c'est-à-dire :
 ,
,
où  sont des constantes réelles.
sont des constantes réelles.
-
Question 2
Solution :
Il suffit de diviser l'équation précédente par  . On obtient :
. On obtient :
 .
.
-
Question 3
Solution :
Il faut au moins 5 observations permettant d'écrire cinq équations.
-
Question 4
Solution :
On a 5 équations de la forme :
 .
.
Qui s'écrivent sous forme matricielle :
 .
.
-
Question 5
Aide :
Il faut pour cela choisir un repère orthormé dans lequel les coordonnées de et sont les plus simples possibles.
Solution :
Comme on est libre sur le système de coordonnées, on peut choisir  à l'origine et
à l'origine et  qui nous définie l'axe des abscisses ainsi que la norme. Ainsi on a
qui nous définie l'axe des abscisses ainsi que la norme. Ainsi on a  , et
, et  .
.
Le système devient :
 .
.
Qu'on peut écrire :
 .
.
Ainsi  et
et  .
.
Le système à résoudre est donc :
 .
.
pages_spectre/exo-determinant.html
Exercice
'Relation de dispersion '
-
Question 1
Aide :
On pourra ramener le système à seulement 3 équations à 3 inconnues en éliminant les 2 inconnues de vitesse. De plus, pour simplifier on peut faire l'hypothèse que la masse des électrons est négligeable devant celle des ions.
Solution :
Le système s'écrit  avec:
avec:
 et
et 
-
Question 2
Solution :
Le système admet une solution non triviale si et seulement si son déterminant est nul. L'équation  donne la relation de dispersion suivante:
donne la relation de dispersion suivante:
-
Question 3
Solution :
pages_spectre/exo-wiener.html
Exercice
'Filtrage de Wiener'
pages_quotient/exo-phenomenes-mutuels.html
Exercice
'Phénomènes mutuels'
-
Question 1
Solution :
Les dates d'opposition du corps A sont  , où k est un nombre entier (relatif).
, où k est un nombre entier (relatif).
Les dates d'opposition du corps B sont  , où k' est un autre nombre entier.
, où k' est un autre nombre entier.
On cherche la première date telle que  , soit
, soit  , où k et k' sont les nombres de périodes effectuées par les corps A et B entre
, où k et k' sont les nombres de périodes effectuées par les corps A et B entre  et
et  . On reconnaît une équation diophantienne, reliant trois nombres entiers.
. On reconnaît une équation diophantienne, reliant trois nombres entiers.
-
Question 2
Solution :
On commence par chercher une solution particulière de l'équation plus simple  . Le couple (-10, -13) est une telle solution.
. Le couple (-10, -13) est une telle solution.
On aura donc (k,k') = 2(-10,-13) = (-20,-26), solution particulière recherchée.
-
Question 3
Solution :
Les couples solutions (x,y) sont tels que  .
.
On cherche y tel que 35 divise 27(y+26), alors que 35 est premier avec 27. Le théorème de Gauss indique que 35 doit être un diviseur entier de y+26, donc qu'il existe un nombre k tel que 
En remplaçant y dans l'équation, on trouve  , donc la solution générale est l'ensemble des couples (27k-20,35k-26), où k est un entier.
, donc la solution générale est l'ensemble des couples (27k-20,35k-26), où k est un entier.
-
Question 4
Solution :
Le plus court intervalle correspond à k = 1, soit  jours.
jours.
-
Question 5
Aide :
L'intervalle entre les deux oppositions est de 193 jours (on calcule ce type d'intervalle en convertissant les dates en jours juliens, ce que font tous les tableurs courants).
Solution :
Le même calcul que précédemment donne
 jours, soit ~ 2156 années.
On remarque aussi que ce résultat dépend de l'échelle d'échantillonnage adoptée : l'intervalle d'une journée est parfaitement arbitraire.
jours, soit ~ 2156 années.
On remarque aussi que ce résultat dépend de l'échelle d'échantillonnage adoptée : l'intervalle d'une journée est parfaitement arbitraire.
pages_quotient/exo-atome-bohr.html
Exercice
'Modèle de Rutherford'
-
Question 1
Aide :
On écrit le principe fondamental de la dynamique et on projette sur le rayon vecteur.
Solution :
La trajectoire étant circulaire, le principe fondamental s'écrit  , soit :
, soit :


-
Question 2
Solution :
L'équation précédente donne directement l'énergie cinétique :
La situation est formellement identique au problème à deux corps en mécanique céleste, on a dans les deux cas une force attractive en  , qui dérive d'un potentiel en 1/r.
, qui dérive d'un potentiel en 1/r.
Le potentiel s'écrit 
En prenant un potentiel nul à l'infini (électron détaché du noyau), la constante d'intégration est nulle.
L'énergie potentielle est donc 
et l'énergie totale vaut 
Rien dans ce modèle n'implique de quantification de la distance électronique ou de l'énergie.
pages_quotient/exo-atome-bohr.html
Exercice
'Atome de Bohr'
-
Question 1
Solution :
Les premières raies de la série de Balmer ont les caractéristiques suivantes :
Série de Balmer
| Niveau de départ |
Niveau d'arrivée |
Nom de la raie |
Longueur d'onde (nm) |
| 3 |
2 |

|
656 |
| 4 |
2 |

|
486 |
| 5 |
2 |

|
434 |
| 6 |
2 |

|
410 |
Les autres séries de raies (Lyman, Paschen, Brackett…) se déduisent de la même façon en modifiant le niveau d'arrivée (p = 2 pour la série de Balmer). La série de Lyman (p = 1) est située dans l'ultraviolet, les autres (p > 2) dans l'infrarouge proche.
Série de Balmer

Les quatre premières raies de la série de Balmer, en lumière visible, vues en émission (l'axe est en longueur d'onde).
Crédit :
Merikanto / Wikipedia
-
Question 2
Solution :
L'énergie émise par rayonnement correspond à une variation de l'énergie de l'atome :

On en déduit :


Les niveaux d'énergie varient en 
-
Question 3
Solution :

Le rayon ne peut donc prendre que des valeurs discrètes :

Le moment cinétique s'écrit :

La valeur expérimentale de la constante de Rydberg est telle que :

qui est l'hypothèse principale du modèle de Bohr : le moment cinétique est quantifié, ses valeurs ne peuvent être que des multiples d'un entier n appelé nombre quantique principal.
-
Question 4
Solution :
Le modèle de Bohr n'a pas d'explication physique simple dans un cadre classique. Les électrons ne peuvent être situés qu'à certaines distances du noyau, définies par n, où ils ne rayonnent pas. Ils sautent d'une position à l'autre spontannément en absorbant ou en cédant la différence d'énergie (par rayonnement ou par collision).
On voit aussi que seul le rayon intervient dans la détermination des configurations atomiques, ce qui revient à dire qu'on ne sait pas localiser l'électron plus précisément. Dans le modèle de Bohr, les électrons sont donc seulement localisés sur une couche sphérique à la distance r du noyau.
pages_quotient/exo-fracont.html
Exercice
'Propriété des réduites'
-
Question 1
Solution :
Raisonnement par récurrence. Vérifier que la propriété est vraie aux premiers rangs, puis la supposer vraie au rang n. Enfin, montrer que l'hérédité de la propriété en remarquant que ![\frac{p_{n+1}}{q_{n+1}} = [a_0;a_1;a_2;a_3;\dots;a_n;a_{n+1}]=[a_0;a_1;a_2;a_3;\dots;a_n + \frac{1}{a_{n+1}}]](../pages_quotient/equations_quotient/equation94.png) et en l'appliquant au rang n.
et en l'appliquant au rang n.
pages_quotient/exo-fracont.html
Exercice
'Une meilleure approximation de l'année tropique'
-
Question 1
Solution :
"L'année grégorienne correspond à 366 jours les années multiples de quatre et non multiples de cent sauf les année multiples de quatre cents. Sinon, l'année vaut 365 jours."
"...Sinon, l'année vaut 365 jours.", donc par défaut 365 jours, après il faut regarder quand ajouter ou soustraire un jour.
"...366 jours les années multiples de quatre...", donc  .
.
"...et non multiples de cent ...", donc  .
.
"...sauf les année multiples de quatre cents.", donc  .
.
Ainsi, une année grégorienne correspond à 
-
Question 2
Solution :
Il suffit d'évaluer l'écart avec l'année tropique. Après calcul, on obtient qu'il se produit un décalage d'un jour au bout de 3231 années.
-
Question 3
Solution :
Détermination de la fraction continue (par la méthode d'approximation d'un réel décrite précédemment), des réduites (par la relation de récurrence) et de la stabilité (au bout de combien de temps, y a-t-il décalage d'un jour?):
![\frac{p_0}{q_0} = [365]= 365](../pages_quotient/equations_quotient/equation99.png) donne un décalage d'un jour en 4 ans.
donne un décalage d'un jour en 4 ans.
![\frac{p_1}{q_1} = [365;4]= 365+\frac{1}{4}](../pages_quotient/equations_quotient/equation100.png) donne un décalage d'un jour en 128 ans.
donne un décalage d'un jour en 128 ans.
![\frac{p_2}{q_2} = [365;4;7]= 365+\frac{7}{29}](../pages_quotient/equations_quotient/equation101.png) donne un décalage d'un jour en 1232 ans.
donne un décalage d'un jour en 1232 ans.
![\frac{p_3}{q_3} = [365;4;7;1]= 365+\frac{8}{33}](../pages_quotient/equations_quotient/equation102.png) donne un décalage d'un jour en 4278 ans.
donne un décalage d'un jour en 4278 ans.
![\frac{p_4}{q_4} = [365;4;7;1;3]= 365+\frac{31}{128}](../pages_quotient/equations_quotient/equation103.png) donne un décalage d'un jour en 331455 ans.
donne un décalage d'un jour en 331455 ans.
Ainsi, la réduite  permet une meilleure approximation de l'année que l'année grégorienne mais la mise en place ne serait pas aisée pour un gain de stabilité d'un millénaire.
permet une meilleure approximation de l'année que l'année grégorienne mais la mise en place ne serait pas aisée pour un gain de stabilité d'un millénaire.
Par contre  serait énormément plus interessant! Pour l'adopter, nous pouvons par exemple proposer de faire des années bissextiles les années multiples de quatre sauf les années multiples de 128 (pas évident à réaliser mais finalement peu contraignant au regard des 331455 ans de stabilité!).
serait énormément plus interessant! Pour l'adopter, nous pouvons par exemple proposer de faire des années bissextiles les années multiples de quatre sauf les années multiples de 128 (pas évident à réaliser mais finalement peu contraignant au regard des 331455 ans de stabilité!).
pages_quotient/exo-fracont.html
Exercice
'L'automate de Huygens'
-
Question 1
Solution :
Soient X et Y entiers naturels correspondant au nombre de dents sur chaque engrenage associé à une planète. Alors l'équation diophantienne à résoudre est  où λ est associée à la révolution de Saturne et μ de la Terre.
où λ est associée à la révolution de Saturne et μ de la Terre.
-
Question 2
Solution :
 .
Ainsi il faudrait deux engrenages contenant 2640858 dents pour la Terre et 77708431 dents pour Saturne...difficilement réalisable à l'époque même avec les meilleures techniques d'horlogerie!
.
Ainsi il faudrait deux engrenages contenant 2640858 dents pour la Terre et 77708431 dents pour Saturne...difficilement réalisable à l'époque même avec les meilleures techniques d'horlogerie!
-
Question 3
Solution :
L'équation diophantienne à résoudre est  . Cela revient à trouver le rationnel
. Cela revient à trouver le rationnel  tel que
tel que  .
.
Pour supprimer le problème technique occasionné par un trop grand nombre de dents, le problème est alors résolu par approximation diophantienne, c'est-à-dire trouver un rationnel approximant convenablement  , qui est techniquement réalisable et sans une trop grande erreur. Pour cela, il faut effectuer un développement de
, qui est techniquement réalisable et sans une trop grande erreur. Pour cela, il faut effectuer un développement de  fraction continue.
fraction continue.
-
Question 4
Solution :
Il faut décomposer  en une fraction continue tout en contrôlant la stabilité (
en une fraction continue tout en contrôlant la stabilité ( ):
):
![\frac{p_0}{q_0} = [29]= 29](../pages_quotient/equations_quotient/equation118.png) donne un décalage de 17,95° sur la position de Saturne après 100 tours de la Terre.
donne un décalage de 17,95° sur la position de Saturne après 100 tours de la Terre.
![\frac{p_1}{q_1} = [29;2]= \frac{59}{2}](../pages_quotient/equations_quotient/equation119.png) donne un décalage de 3.09° sur la position de Saturne après 100 tours de la Terre.
donne un décalage de 3.09° sur la position de Saturne après 100 tours de la Terre.
![\frac{p_2}{q_2} = [29;2;2]= \frac{147}{5}](../pages_quotient/equations_quotient/equation120.png) donne un décalage de 1,06° sur la position de Saturne après 100 tours de la Terre.
donne un décalage de 1,06° sur la position de Saturne après 100 tours de la Terre.
![\frac{p_3}{q_3} = [29;2;2;1]= \frac{206}{7}](../pages_quotient/equations_quotient/equation121.png) donne un décalage de 7.79' sur la position de Saturne après 100 tours de la Terre.
donne un décalage de 7.79' sur la position de Saturne après 100 tours de la Terre.
![\frac{p_4}{q_4} = [29;2;2;1;5]= \frac{1177}{40}](../pages_quotient/equations_quotient/equation122.png) donne un décalage de 1.12' sur la position de Saturne après 100 tours de la Terre.
donne un décalage de 1.12' sur la position de Saturne après 100 tours de la Terre.
Ainsi, en tenant compte qu'il est difficile de construire des engrenages comportant plus de 1000 dents et au regard de la stabilité obtenue après 100 révolutions de la Terre, le système le plus optimal serait d'utiliser une roue comportant 7 dents pour la Terre et 206 dents pour Saturne.
C'est ce qu'avait conclu Christian Huygens à son époque!
pages_quotient/exo-fracont.html
Exercice
'Le cycle de Saros'
-
Question 1
Solution :
Le Soleil, la Terre et la Lune sont trois points de l'espace.
Soit  , le plan défini par l'orbite de la Terre autour du Soleil (plan de l'écliptique) et soit
, le plan défini par l'orbite de la Terre autour du Soleil (plan de l'écliptique) et soit  , la droite passant par la Terre et le Soleil.
, la droite passant par la Terre et le Soleil.
Il y a éclipse lorsque  (Lune dans le plan de l'écliptique) et
(Lune dans le plan de l'écliptique) et (Lune alignée sur la droite Terre-Soleil).
On notera qu'il y a éclipse de Lune si on a l'ordre
(Lune alignée sur la droite Terre-Soleil).
On notera qu'il y a éclipse de Lune si on a l'ordre  . Dans ce cas la Lune passe dans le côte d'ombre de la Terre.
Et il y a éclipse de Soleil lorsque
. Dans ce cas la Lune passe dans le côte d'ombre de la Terre.
Et il y a éclipse de Soleil lorsque  .
.
-
Question 2
Solution :
Le plan orbital de la Lune étant incliné relativement au plan de l'écliptique, une éclipse apparaît lorsque le satellite naturel de la Terre passe à l'intersection du plan orbital de la Terre et de celui de l'orbite lunaire. Sur l'ellipse décrite par la Lune, ce sont deux points appelés noeud ascendant et descendant.
En terme d'éclairement de la Lune relativement à la Terre, le fait d'appartenir à la droite  signifie soit une nouvelle-lune (Lune invisible sur Terre) pour l'éclipse de Soleil, soit une pleine-lune pour l'éclipse de Lune.
signifie soit une nouvelle-lune (Lune invisible sur Terre) pour l'éclipse de Soleil, soit une pleine-lune pour l'éclipse de Lune.
-
Question 3
Solution :
En partant d'une éclipse, et donc nouvelle/pleine-lune et Lune au noeud ascendant/descendant, pour prédire une nouvelle éclipse il doit exister une équation diophantienne reliant les deux périodes. Soient X et Y entiers naturels alors l'équation diophantienne à résoudre est  .
.
-
Question 4
Solution :
L'équation diophantienne à résoudre est  . Cela revient à trouver le rationnel
. Cela revient à trouver le rationnel  tel que
tel que  .
.
La Lune et le Soleil n'étant pas des objets ponctuels (30' d'arc de diamètre), il est possible de résoudre le problème par approximation diophantienne, c'est-à-dire trouver un rationnel approximant convenablement  tout en contrôlant l'écart de coincidence afin de vérifier qu'il y a bien éclipse (que la configuration n'est pas trop éloignée de la configuration d'éclipse total: c'est ce qu'on appelle une éclipse partielle).
tout en contrôlant l'écart de coincidence afin de vérifier qu'il y a bien éclipse (que la configuration n'est pas trop éloignée de la configuration d'éclipse total: c'est ce qu'on appelle une éclipse partielle).
-
Question 5
Solution :
Dans l'approximation des orbites circulaires, la Lune parcourt 1° en 1h48min relativement à l'axe formé par les noeuds. De même, la Lune relativement à l'axe Terre-Soleil parcourt 1° en 1h58min.
Il n'y a plus éclipse lorsque le centre de la Lune est à plus de 0.5° du passage au noeud ascendant ou à 0.5° de l'axe Terre-Soleil sur le cercle décrivant la lunaison.
Ainsi, nous pouvons considérer qu'il n'y a plus éclipse lorsque l'écart de coincidence en temps est supérieur à 54min (on regarde le minimum des deux temps de parcours pour 1° et on évalue le temps que met le centre de la Lune pour être décallé de plus de 0.5° par rapport au point donnant une éclipse totale).
Donc, pour retrouver une éclipse (totale ou partielle) à partir d'une configuration d'éclipse totale, il faut trouver deux entiers, X et Y tels que  .
.
-
Question 6
Solution :
Détermination de la fraction continue (par la méthode d'approximation d'un réel décrite précédemment), des réduites (par la relation de récurrence) et des erreurs de coïncidence associées ( ):
):
![\frac{p_0}{q_0} = [1]= 1~~\mbox{ et } \epsilon_0 = 2\mbox{j}~7\mbox{h}38\mbox{min}](../pages_quotient/equations_quotient/equation139.png)
![\frac{p_1}{q_1} = [1;11]= \frac{12}{11}~~\mbox{ et } \epsilon_1 = 1\mbox{j}~16\mbox{h}58\mbox{min}](../pages_quotient/equations_quotient/equation140.png)
![\frac{p_2}{q_2} = [1;11;1]= \frac{13}{12}~~\mbox{ et } \epsilon_2 = 14\mbox{h}41\mbox{min}](../pages_quotient/equations_quotient/equation141.png)
![\frac{p_3}{q_3} = [1;11;1;2]= \frac{38}{35}~~\mbox{ et } \epsilon_3 = 11\mbox{h}36\mbox{min}](../pages_quotient/equations_quotient/equation142.png)
![\frac{p_4}{q_4} = [1;11;1;2;1]= \frac{51}{47}~~\mbox{ et } \epsilon_4 = 3\mbox{h}12\mbox{min}](../pages_quotient/equations_quotient/equation143.png)
![\frac{p_5}{q_5} = [1;11;1;2;1;3]= \frac{191}{176}~~\mbox{ et } \epsilon_5 = 2\mbox{h}21\mbox{min}](../pages_quotient/equations_quotient/equation144.png)
![\frac{p_6}{q_6} = [1;11;1;2;1;3;1]= \frac{242}{223}~~\mbox{ et } \epsilon_6 = 45\mbox{min}](../pages_quotient/equations_quotient/equation145.png)
-
Question 7
Solution :
Par la question précédente, nous pouvons conclure qu'après un temps correspondant à 223 lunaisons après une éclipse totale (où 242 mois draconitiques), nous sommes dans une configuration d'éclipse approchée avec un écart de 42 minutes sur la configuration exacte mais suffisamment proche de celle-ci pour que le disque lunaire intersecte le disque solaire (éclipse de Soleil) ou que le disque lunaire entre dans le cône d'ombre de la Terre (éclipse de Lune).
Ainsi, un cycle de Saros, c'est-à-dire le temps pour prédire le retour d'une éclipse (après une éclipse totale) est bien de 223 lunaisons.
-
Question 8
Solution :
Tout d'abord, 223 lunaisons correspond à 6585.38 jours, c'est-à-dire un peu plus de 18 ans. Or entre le 11 août 1999 et 2017, il y a 5 années bissextiles. Donc l'éclipse se déroulera 18 ans et 10 jours après: le 21 août 2017.
Par contre, les 0.38 jours restant impliquent que la Terre aura tourné d'un quart sur son axe ce qui correspond approximativement aux longitudes de l'Amérique du Nord. Donc, malheureusement invisible en France...
 a toutes ses racines dans
a toutes ses racines dans ![[-1,+1]](../pages_poly/equations_poly/equation59.png) et en a
et en a  distinctes.
distinctes.
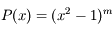 a
a  racines. Elles sont non disctinctes car il s'agit de
racines. Elles sont non disctinctes car il s'agit de  et
et  chacune d'elles étant d'ordre
chacune d'elles étant d'ordre  .
.
 et
et  pour tout
pour tout  , où
, où
 sur l'intervalle
sur l'intervalle ![[-1,+1]](../pages_poly/equations_poly/equation70.png)
 qui s'annulle en
qui s'annulle en  ,
,  et
et  (ces trois racines sont distinctes)
(ces trois racines sont distinctes)
 sur l'intervalle
sur l'intervalle ![[-1,x_{1,1}]](../pages_poly/equations_poly/equation76.png) , puis sur
, puis sur ![[x_{1,1},+1]](../pages_poly/equations_poly/equation77.png) . On a donc les racines
. On a donc les racines  ,
,  ,
,  et
et  (ces quatres racines sont distinctes). Rédigez ensuite la récurrence. Une rédaction propre n'est pas si aisée. Faites la avec soin et choissisez bien vos notations (par exemple, bien différencier l'indice du polynôme et l'indice de la récurrence).
(ces quatres racines sont distinctes). Rédigez ensuite la récurrence. Une rédaction propre n'est pas si aisée. Faites la avec soin et choissisez bien vos notations (par exemple, bien différencier l'indice du polynôme et l'indice de la récurrence).
 ,...,
,..., tels que
tels que  soit solution de l'équation matricielle, avec
soit solution de l'équation matricielle, avec  . Il est évidemment impossible de résoudre cette équation analytiquement pour
. Il est évidemment impossible de résoudre cette équation analytiquement pour  quelconque. On peut néanmoins déduire des propriétés générales sur les solutions.
quelconque. On peut néanmoins déduire des propriétés générales sur les solutions.
 tel que
tel que  pour tout
pour tout  (f' n'est pas définie en 0).
(f' n'est pas définie en 0).
 est impair. Déterminer le rang de la matrice
est impair. Déterminer le rang de la matrice  , puis en déduire qu'il existe une famille à
, puis en déduire qu'il existe une famille à  paramètres, avec
paramètres, avec  entier impair, de vecteurs
entier impair, de vecteurs  pour laquelle
pour laquelle  est une configuration stationnaire.
est une configuration stationnaire.
 ,
,
 est un vecteur de dimension
est un vecteur de dimension  , et
, et  une fonction vectorielle de dimension
une fonction vectorielle de dimension  continue et dérivable.
continue et dérivable.
 suivant le vecteur
suivant le vecteur  la quantité:
la quantité:
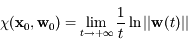 ,
,
 est solution de l'équation différentielle:
est solution de l'équation différentielle:
 ,
,
 est le
est le  .
.
 . Les vecteurs
. Les vecteurs  et
et  sont les conditions initiales de ces équations différentielles.
sont les conditions initiales de ces équations différentielles.
 le vecteur tangent à la trajectoire. Il évolue dans un espace appelé espace tangent qui peut être identifié à
le vecteur tangent à la trajectoire. Il évolue dans un espace appelé espace tangent qui peut être identifié à 
 est chaotique ou pas.
Par exemple sur la figure ci-dessous on peut voir qu'un dérivé des exposants de Lyapunov (Exposant de Lyapunov Rapide) se comporte de manière différente pour une trajectoire régulière (accroisement linéaire) et pour une trajectoire chaotique (accroissement exponentiel).
Dans la suite on va étudier les exposants de Lyapunov associés à la trajectoire passant par
est chaotique ou pas.
Par exemple sur la figure ci-dessous on peut voir qu'un dérivé des exposants de Lyapunov (Exposant de Lyapunov Rapide) se comporte de manière différente pour une trajectoire régulière (accroisement linéaire) et pour une trajectoire chaotique (accroissement exponentiel).
Dans la suite on va étudier les exposants de Lyapunov associés à la trajectoire passant par  à
à  et démontrer quelques propriétés élémentaires de ces exposants, en particulier leur similarité avec le spectre des valeurs propres d'en endomorphisme.
et démontrer quelques propriétés élémentaires de ces exposants, en particulier leur similarité avec le spectre des valeurs propres d'en endomorphisme.
 et de période
et de période  . Ainsi après une période on a
. Ainsi après une période on a  , où
, où  est une matrice carrée de dimension
est une matrice carrée de dimension  , et pour
, et pour  on a
on a  . Montrer que si
. Montrer que si  est un vecteur propre de la matrice
est un vecteur propre de la matrice  associé à la valeur propre
associé à la valeur propre  alors:
alors:
 . Dans le cas général la matrice
. Dans le cas général la matrice  n'existe pas. Cependant on va voir qu'on peut définir un spectre d'exposants de Lypunov associé au Jacobien de
n'existe pas. Cependant on va voir qu'on peut définir un spectre d'exposants de Lypunov associé au Jacobien de  ayant certaines similarités avec le spectre des valeurs propres d'une matrice.
ayant certaines similarités avec le spectre des valeurs propres d'une matrice.
 , pour
, pour  .
.
 , montrer que pour tout
, montrer que pour tout  , l'ensemble
, l'ensemble  , forme un sous-espace vectoriel de
, forme un sous-espace vectoriel de  .
.
 exposants distincts et tels que
exposants distincts et tels que  , avec
, avec  , alors les vecteurs
, alors les vecteurs  forment une base
de
forment une base
de  .
Dans la pratique, on ne connait pas les vecteurs permettant de déterminer les exposants de Lyapunov. Mais si on prend un vecteur au hasard il apartiendra à
.
Dans la pratique, on ne connait pas les vecteurs permettant de déterminer les exposants de Lyapunov. Mais si on prend un vecteur au hasard il apartiendra à  mais peu probablement à
mais peu probablement à  . En effet pour qu'il y appartienne il faudrait que la composante de ce vecteur suivant
. En effet pour qu'il y appartienne il faudrait que la composante de ce vecteur suivant  soit égale à zéro. Lors d'un tirage au hasard cette probabilité est nulle.
soit égale à zéro. Lors d'un tirage au hasard cette probabilité est nulle.
 . Il permet de savoir si une orbite est stable ou chaotique. En effet dans le cas d'une orbite stable la norme du vecteur tangent va très probablement augmenter linéairement avec le temps, ainsi
. Il permet de savoir si une orbite est stable ou chaotique. En effet dans le cas d'une orbite stable la norme du vecteur tangent va très probablement augmenter linéairement avec le temps, ainsi  , alors que dans le cas chaotique elle va augmenter très probablement exponentiellement avec le temps, ainsi
, alors que dans le cas chaotique elle va augmenter très probablement exponentiellement avec le temps, ainsi  .
.
 le repère
le repère  , où
, où  est perpendiculaire à
est perpendiculaire à  dans le plan
dans le plan  et tel que l'angle
et tel que l'angle  soit inférieur à
soit inférieur à  en valeur absolue et
en valeur absolue et  complète un repère orthonormé direct.
complète un repère orthonormé direct. le repère
le repère  ,
,  le repère
le repère  ,
, le repère
le repère  , où
, où  est perpendiculaire à
est perpendiculaire à  dans le plan
dans le plan  et tel que l'angle
et tel que l'angle  soit inférieur à
soit inférieur à  en valeur absolue et
en valeur absolue et  complète un repère orthonormé direct.
complète un repère orthonormé direct. le repère
le repère  ,
, le repère
le repère 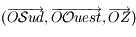 .
. au repère
au repère  par une rotation d'angle
par une rotation d'angle  et d'axe
et d'axe  . Donner la matrice de passage
. Donner la matrice de passage  de la base de
de la base de  à celle de
à celle de  .
.
 au repère
au repère  par une rotation d'angle
par une rotation d'angle  et d'axe
et d'axe  . Donner la matrice de passage
. Donner la matrice de passage  de la base de
de la base de  à celle de
à celle de  .
.
 au repère
au repère  par une rotation d'angle
par une rotation d'angle  et d'axe
et d'axe  . Donner la matrice de passage
. Donner la matrice de passage  de la base de
de la base de  à celle de
à celle de  .
.
 au repère
au repère  par une rotation d'angle
par une rotation d'angle  et d'axe
et d'axe  . Donner la matrice de passage
. Donner la matrice de passage  de la base de
de la base de  à celle de
à celle de  .
.
 au repère
au repère  par une rotation d'angle
par une rotation d'angle  et d'axe
et d'axe  . Donner la matrice de passage
. Donner la matrice de passage  de la base de
de la base de  à celle de
à celle de  .
.
 en fonction de
en fonction de  et
et  dans
dans  .
.
 en fonction de
en fonction de  et
et  dans
dans  . Puis les coordonnées de
. Puis les coordonnées de  dans le repère
dans le repère  en fonction
de
en fonction
de  et
et  . En déduire trois relations, dépendant de
. En déduire trois relations, dépendant de  , entre les coordonnées horaires et les coordonnées locales du Soleil.
, entre les coordonnées horaires et les coordonnées locales du Soleil.
 (mesuré entre -12h et +12h) et de la durée du jour au moment des équinoxes (
(mesuré entre -12h et +12h) et de la durée du jour au moment des équinoxes ( ), du solstice d'été
), du solstice d'été  et du solstice d'hiver (
et du solstice d'hiver ( ) en un point de latitude
) en un point de latitude  (approximativement la ville de Lille, France)
(approximativement la ville de Lille, France)
 ,
,  et
et  et ayant
et ayant  et
et  comme paramètres.
comme paramètres.
 . Ce vecteur resulte de l'image initiale,
. Ce vecteur resulte de l'image initiale,  , qui a été convoluée par le télescope auquel s'ajoute un vecteur bruit noté
, qui a été convoluée par le télescope auquel s'ajoute un vecteur bruit noté  .
La convolution se modélise par l'application d'une matrice
.
La convolution se modélise par l'application d'une matrice  sur le vecteur
sur le vecteur  . Ainsi on a:
. Ainsi on a:
 .
Dans l'espace de Fourier, cette relation s'ecrit:
.
Dans l'espace de Fourier, cette relation s'ecrit:  où
où  représente la fréquence spatiale en deux dimensions. Dans cet espace, la matrice
représente la fréquence spatiale en deux dimensions. Dans cet espace, la matrice  est diagonale de valeur propre
est diagonale de valeur propre  .
Le spectre de puissance de l'image suit souvent une loi de puissance, c'est à dire
.
Le spectre de puissance de l'image suit souvent une loi de puissance, c'est à dire  et le bruit est souvent un bruit blanc c'est à dire qu'il à la même intensité quelquesoit la fréquence spatiale,
et le bruit est souvent un bruit blanc c'est à dire qu'il à la même intensité quelquesoit la fréquence spatiale,  , où
, où  et
et  sont des constantes.
Montrer que l'inversion simple de cette relation (qui consiste à appliquer la matrice
sont des constantes.
Montrer que l'inversion simple de cette relation (qui consiste à appliquer la matrice  sur les données
sur les données  afin de retrouver
afin de retrouver  ) conduit, au delà d'une certaine fréquence, à une amplification du bruit.
) conduit, au delà d'une certaine fréquence, à une amplification du bruit.
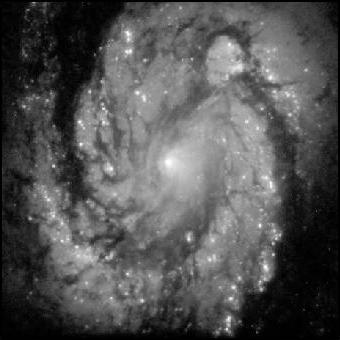
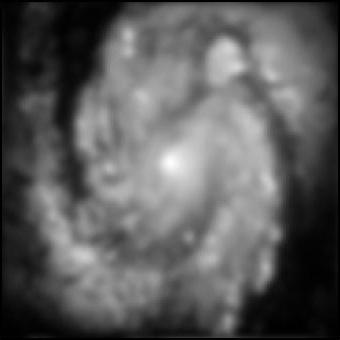
 à appliquer sur les données
à appliquer sur les données  qui va minimiser l'écart quadratique moyen entre la vraie image
qui va minimiser l'écart quadratique moyen entre la vraie image  et l'image filtrée
et l'image filtrée  . On cherche donc à minimiser la quantité
. On cherche donc à minimiser la quantité  par rapport à
par rapport à  . En postulant que le bruit et le signal sont décorrélés et que le bruit est non biaisé (pas d'erreur systématique), montrer que
. En postulant que le bruit et le signal sont décorrélés et que le bruit est non biaisé (pas d'erreur systématique), montrer que  ,où
,où  et
et  sont les matrices de variance-covariance du signal et du bruit.
sont les matrices de variance-covariance du signal et du bruit.
 ou tout autre produit de ce genre. Si les données sont non biaisées,
ou tout autre produit de ce genre. Si les données sont non biaisées,  .
.
 et
et  , alors afin de caractériser le retour mutuel de ces deux phénomènes, il est commode de chercher deux entiers X et Y tels que
, alors afin de caractériser le retour mutuel de ces deux phénomènes, il est commode de chercher deux entiers X et Y tels que  . Or généralement, les périodes ne sont malheureusement pas des nombres entiers ce qui implique de grands nombres entiers pour X et Y.
. Or généralement, les périodes ne sont malheureusement pas des nombres entiers ce qui implique de grands nombres entiers pour X et Y.
 approchant
approchant  de façon à résoudre le problème au voisinage de la résonnance. C'est ce qu'on appelle l'approximation diophantienne. Nous utiliserons pour cela les fractions continues.
de façon à résoudre le problème au voisinage de la résonnance. C'est ce qu'on appelle l'approximation diophantienne. Nous utiliserons pour cela les fractions continues.
 et
et  n'apparaissent pas. Cela résulte des
n'apparaissent pas. Cela résulte des  à un sous-ensemble de
à un sous-ensemble de .
.
 "presque partout". Dans l'espace des
"presque partout". Dans l'espace des  , l'ensemble pour lequel le rang de
, l'ensemble pour lequel le rang de est
est  ,
,  ,..., est de mesure nulle.
Ainsi étant donnée par exemple
,..., est de mesure nulle.
Ainsi étant donnée par exemple  , il y aura une et une seule solution
, il y aura une et une seule solution pour laquelle
pour laquelle  est une configuration d'équilibre.
est une configuration d'équilibre.
 sera "presque partout"
sera "presque partout"  sur
sur  . Dans ce cas, il existe une famille à 2 paramètres de vecteurs pour lesquels la configuration est stationnaire.
. Dans ce cas, il existe une famille à 2 paramètres de vecteurs pour lesquels la configuration est stationnaire.
 . Ainsi:
. Ainsi:
 .
.
 est linéaire. On en déduit que si
est linéaire. On en déduit que si  désigne l'évolution de
désigne l'évolution de  et
et  l'évolution de
l'évolution de  alors on a
alors on a  . Ainsi on a :
. Ainsi on a :

 , si on note
, si on note  et
et  les évolutions respectives de
les évolutions respectives de  et
et  on a:
on a:
 .
.
 . Ainsi, la fonction logarithme étant croissante, on a:
. Ainsi, la fonction logarithme étant croissante, on a:

 , ainsi
, ainsi  ce qui permet d'éliminer le facteur
ce qui permet d'éliminer le facteur  lors du passage à la limite (division par
lors du passage à la limite (division par  ).
).
 ,
,
 . En tant que sous-espace d'un espace vectoriel, il suffit de montrer donc de montrer que
. En tant que sous-espace d'un espace vectoriel, il suffit de montrer donc de montrer que  est stable par combinaison linéaire. Ceci est une conséquance immédiate des deux questions précédentes.
est stable par combinaison linéaire. Ceci est une conséquance immédiate des deux questions précédentes.
 . soit
. soit  les
les  exposants de Lyapunov, tels que
exposants de Lyapunov, tels que  . Par définition on a
. Par définition on a  avec
avec  .
Ainsi
.
Ainsi  . Soit
. Soit  . Or
. Or  qui est de dimension
qui est de dimension  , donc il ne peut y avoir
, donc il ne peut y avoir  exposants de Lyapunov distincts.
exposants de Lyapunov distincts.
 où
où  est la matrice identtée. Il est de degré 2. La résolution de
est la matrice identtée. Il est de degré 2. La résolution de  donnent les racines
donnent les racines  ''/jour et
''/jour et  ''/jour. Ces valeurs propres sont distinctes donc
''/jour. Ces valeurs propres sont distinctes donc  est diagonalisable.
est diagonalisable.
 est diagonalisable donc il existe une matrice
est diagonalisable donc il existe une matrice  tel que:
tel que:
 avec
avec 


 , le système est trivialement intégrable:
, le système est trivialement intégrable:
 ou plutôt
ou plutôt  puisque
puisque  est donné en seconde de degré (par jour). Il faut encore diviser le résultat par
est donné en seconde de degré (par jour). Il faut encore diviser le résultat par  pour l'avoir en année.
pour l'avoir en année.
 , il faudra inverser un système
, il faudra inverser un système  .
.

 varie entre
varie entre  et
et 
 varie entre
varie entre  et
et 
 . Comme le spectre de puissance de l'image decroit quand
. Comme le spectre de puissance de l'image decroit quand  augmente et que celui du bruit reste constant, il existe une fréquence limite
augmente et que celui du bruit reste constant, il existe une fréquence limite  à partir delaquelle
à partir delaquelle  et donc le bruit est amplifié et domine la reconstruction de l'image.
et donc le bruit est amplifié et domine la reconstruction de l'image.
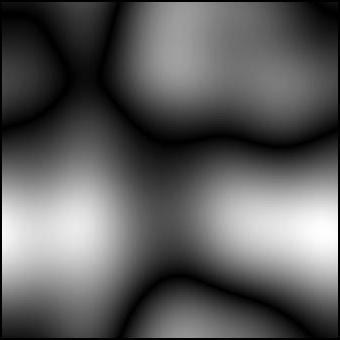
 .
Minimiser
.
Minimiser  par rapport à
par rapport à  revient à resoudre
revient à resoudre  . Ceci conduit à
. Ceci conduit à 
 donc à petit
donc à petit  ,
,  et
et  et à grand
et à grand  ,
,  et
et  .
Les très hautes fréquences dominées par le bruit sont coupées, l'image est donc filtrée.
.
Les très hautes fréquences dominées par le bruit sont coupées, l'image est donc filtrée.