Ex: Filtrage de Wiener |
Difficulté : ☆☆ Temps : 40mn
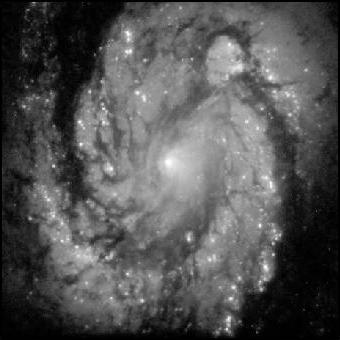
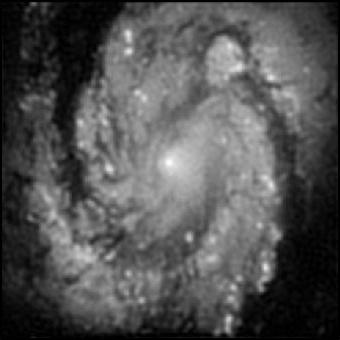
L'image reçue par le CCD est une collection de pixels que l'on rassemble sous la forme d'un vecteur  . Ce vecteur resulte de l'image initiale,
. Ce vecteur resulte de l'image initiale,  , qui a été convoluée par le télescope auquel s'ajoute un vecteur bruit noté
, qui a été convoluée par le télescope auquel s'ajoute un vecteur bruit noté  .
La convolution se modélise par l'application d'une matrice
.
La convolution se modélise par l'application d'une matrice  sur le vecteur
sur le vecteur  . Ainsi on a:
. Ainsi on a:
 .
Dans l'espace de Fourier, cette relation s'ecrit:
.
Dans l'espace de Fourier, cette relation s'ecrit:  où
où  représente la fréquence spatiale en deux dimensions. Dans cet espace, la matrice
représente la fréquence spatiale en deux dimensions. Dans cet espace, la matrice  est diagonale de valeur propre
est diagonale de valeur propre  .
Le spectre de puissance de l'image suit souvent une loi de puissance, c'est à dire
.
Le spectre de puissance de l'image suit souvent une loi de puissance, c'est à dire  et le bruit est souvent un bruit blanc c'est à dire qu'il à la même intensité quelquesoit la fréquence spatiale,
et le bruit est souvent un bruit blanc c'est à dire qu'il à la même intensité quelquesoit la fréquence spatiale,  , où
, où  et
et  sont des constantes.
Montrer que l'inversion simple de cette relation (qui consiste à appliquer la matrice
sont des constantes.
Montrer que l'inversion simple de cette relation (qui consiste à appliquer la matrice  sur les données
sur les données  afin de retrouver
afin de retrouver  ) conduit, au delà d'une certaine fréquence, à une amplification du bruit.
) conduit, au delà d'une certaine fréquence, à une amplification du bruit.
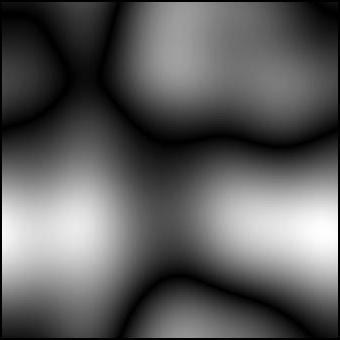
On cherche donc maintenant à déconvoluer l'image mais aussi à filtrer le bruit. Pour cela, on va chercher le filtre  à appliquer sur les données
à appliquer sur les données  qui va minimiser l'écart quadratique moyen entre la vraie image
qui va minimiser l'écart quadratique moyen entre la vraie image  et l'image filtrée
et l'image filtrée  . On cherche donc à minimiser la quantité
. On cherche donc à minimiser la quantité  par rapport à
par rapport à  . En postulant que le bruit et le signal sont décorrélés et que le bruit est non biaisé (pas d'erreur systématique), montrer que
. En postulant que le bruit et le signal sont décorrélés et que le bruit est non biaisé (pas d'erreur systématique), montrer que  ,où
,où  et
et  sont les matrices de variance-covariance du signal et du bruit.
sont les matrices de variance-covariance du signal et du bruit.
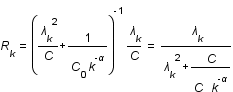
Dans l'espace de Fourier, les matrices de variance-covariance sont diagonales également et se réduisent aux spectres de puissances. Montrer que le filtre de Wiener  inverse les basses fréquences et coupe les plus grandes où le bruit domine.
inverse les basses fréquences et coupe les plus grandes où le bruit domine.
 . Comme le spectre de puissance de l'image decroit quand
. Comme le spectre de puissance de l'image decroit quand  augmente et que celui du bruit reste constant, il existe une fréquence limite
augmente et que celui du bruit reste constant, il existe une fréquence limite  à partir delaquelle
à partir delaquelle  et donc le bruit est amplifié et domine la reconstruction de l'image.
et donc le bruit est amplifié et domine la reconstruction de l'image.
 ou tout autre produit de ce genre. Si les données sont non biaisées,
ou tout autre produit de ce genre. Si les données sont non biaisées,  .
.
 .
Minimiser
.
Minimiser  par rapport à
par rapport à  revient à resoudre
revient à resoudre  . Ceci conduit à
. Ceci conduit à 
 donc à petit
donc à petit  ,
,  et
et  et à grand
et à grand  ,
,  et
et  .
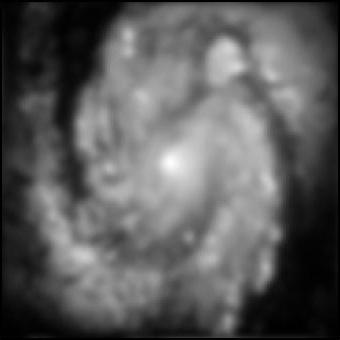
Les très hautes fréquences dominées par le bruit sont coupées, l'image est donc filtrée.
.
Les très hautes fréquences dominées par le bruit sont coupées, l'image est donc filtrée.