Détermination des points fixes
Afin de déterminer les positions des points de Lagrange, nous devons traduire la condition ci-dessus certifiant que la sonde reste dans un point fixe si elle y est placée sans vitesse initiale, nous allons donc calculer la dérivée des positions et vitesses et les mettre à zéro, ce qui donne :
Au vu des équations du mouvement, cette condition nous permet de régler le cas de

et

:

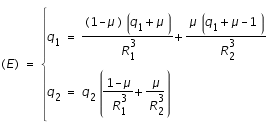
Nous pouvons alors calculer les positions en

et

: